osi3::MountingPosition Struct Reference
Public Attributes
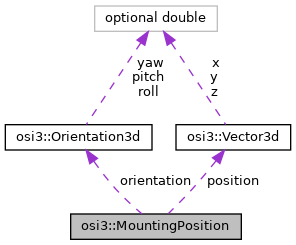
| optional Vector3d | position = 1 |
| Offset position relative to the specified reference coordinate system. More... | |
| optional Orientation3d | orientation = 2 |
| Orientation offset relative to the specified reference coordinate system. More... | |
Detailed Description
Specifies the mounting position of a sensor.
Details are specified in each instance where MountingPosition is used.
Member Data Documentation
◆ position
| optional Vector3d osi3::MountingPosition::position = 1 |
Offset position relative to the specified reference coordinate system.
◆ orientation
| optional Orientation3d osi3::MountingPosition::orientation = 2 |
Orientation offset relative to the specified reference coordinate system.
\( Origin_{sensor} := Rotation_{yaw,pitch,roll}( \) orientation \( )*(Origin_{\text{reference coord system}} - \) position \( )\)
- osi_common.proto