osi3::TrafficAction::SpeedAction Struct Reference
Public Attributes
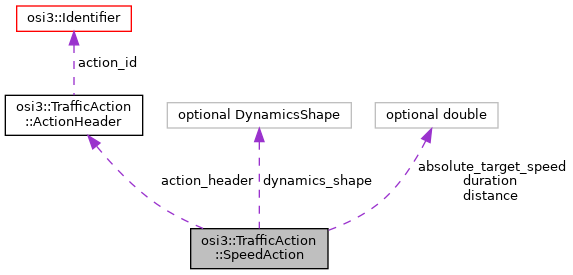
| optional ActionHeader | action_header = 1 |
| The action header. More... | |
| optional double | absolute_target_speed = 2 |
| Targeted absolute speed. More... | |
| optional DynamicsShape | dynamics_shape = 3 |
| Specified transition shape of the speed change action. More... | |
| optional double | duration = 4 |
| Duration of the speed change. More... | |
| optional double | distance = 5 |
| Distance of the speed change. More... | |
Detailed Description
Speed action.
This action assigns a targeted speed to a traffic participant. The action can be constrained by specifying the dynamics shape or even the duration and the distance of the acceleration / deceleration process.
- Note
- This action is aligned with SpeedAction of OpenSCENARIO 1.0 defining the targeted speed and optionally the parametrization of the speed transition.
Member Data Documentation
◆ action_header
| optional ActionHeader osi3::TrafficAction::SpeedAction::action_header = 1 |
The action header.
◆ absolute_target_speed
| optional double osi3::TrafficAction::SpeedAction::absolute_target_speed = 2 |
Targeted absolute speed.
◆ dynamics_shape
| optional DynamicsShape osi3::TrafficAction::SpeedAction::dynamics_shape = 3 |
Specified transition shape of the speed change action.
If the shape is unspecified (enum value 0), the shape of the speed change is open to the traffic participant model.
◆ duration
| optional double osi3::TrafficAction::SpeedAction::duration = 4 |
Duration of the speed change.
A value of 0.0 (the default value) imposes no constraint on the duration, unless the dynamics shape is a step function, where an immediate step is effected.
Unit: s
◆ distance
| optional double osi3::TrafficAction::SpeedAction::distance = 5 |
Distance of the speed change.
A value of 0.0 (the default value) imposes no constraint on the distance, unless the dynamics shape is a step function, where an immediate step is effected.
Unit: m
- osi_trafficcommand.proto