osi3::DetectedMovingObject Struct Reference
Classes
| struct | CandidateMovingObject |
| A candidate for a detected moving object as estimated by the sensor. More... | |
Public Types
| enum | ReferencePoint { REFERENCE_POINT_UNKNOWN = 0, REFERENCE_POINT_OTHER = 1, REFERENCE_POINT_CENTER = 2, REFERENCE_POINT_MIDDLE_LEFT = 3, REFERENCE_POINT_MIDDLE_RIGHT = 4, REFERENCE_POINT_REAR_MIDDLE = 5, REFERENCE_POINT_REAR_LEFT = 6, REFERENCE_POINT_REAR_RIGHT = 7, REFERENCE_POINT_FRONT_MIDDLE = 8, REFERENCE_POINT_FRONT_LEFT = 9, REFERENCE_POINT_FRONT_RIGHT = 10 } |
| Definition of available reference points. More... | |
| enum | MovementState { MOVEMENT_STATE_UNKNOWN = 0, MOVEMENT_STATE_OTHER = 1, MOVEMENT_STATE_STATIONARY = 2, MOVEMENT_STATE_MOVING = 3, MOVEMENT_STATE_STOPPED = 4 } |
| Information about a possible movement of the object during tracking. More... | |
Public Attributes
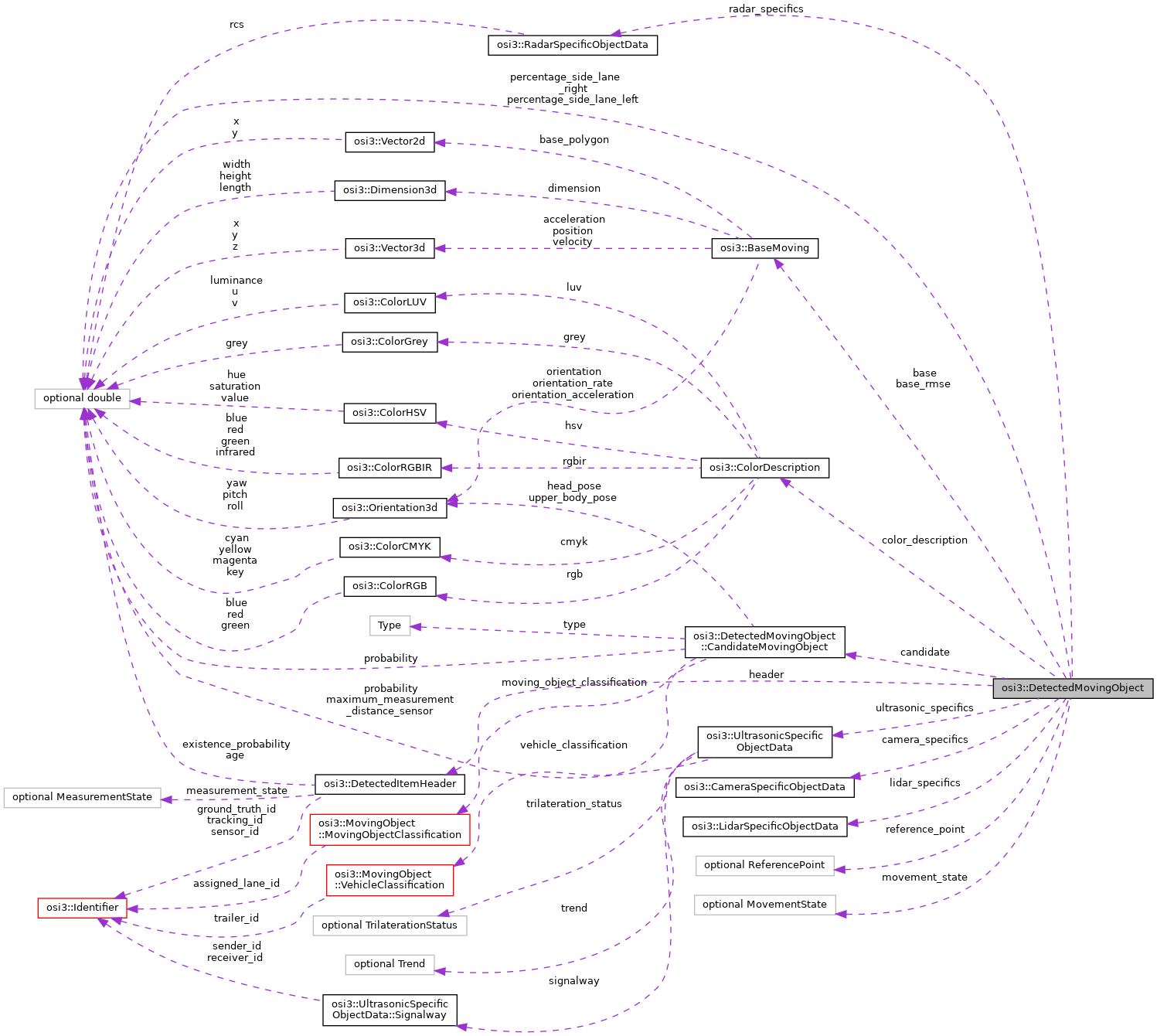
| optional DetectedItemHeader | header = 1 |
| Common information of one detected item. More... | |
| optional BaseMoving | base = 2 |
| The base parameters of the moving object. More... | |
| optional BaseMoving | base_rmse = 3 |
| The root mean squared error of the base parameters of the detected moving object (e.g. More... | |
| optional ReferencePoint | reference_point = 4 |
| Reference point location specification of the sensor measurement (required to decouple sensor measurement, position and bounding box estimation) as used by the sensor (model). More... | |
| optional MovementState | movement_state = 5 |
| Actual movement state w.r.t. More... | |
| optional double | percentage_side_lane_left = 6 |
| Percentage side lane left. More... | |
| optional double | percentage_side_lane_right = 7 |
| Percentage side lane right. More... | |
| repeated CandidateMovingObject | candidate = 8 |
| A list of candidates for this moving object as estimated by the sensor (e.g. More... | |
| optional ColorDescription | color_description = 9 |
| The dominating color of the material of the moving object. More... | |
| optional RadarSpecificObjectData | radar_specifics = 100 |
| Additional data that is specific to radar sensors. More... | |
| optional LidarSpecificObjectData | lidar_specifics = 101 |
| Additional data that is specific to lidar sensors. More... | |
| optional CameraSpecificObjectData | camera_specifics = 102 |
| Additional data that is specific to camera sensors. More... | |
| optional UltrasonicSpecificObjectData | ultrasonic_specifics = 103 |
| Additional data that is specific to ultrasonic sensors. More... | |
Detailed Description
Moving object in the environment as detected and perceived by the sensor.
The parent frame of a detected moving object is the virtual sensor coordinate system.
/note The virtual sensor coordinate system is relative to the vehicle coordinate system which has its origin in the center of the rear axle of the ego vehicle. This means if virtual sensor mounting position and orientation are set to (0,0,0) the virtual sensor coordinate system coincides with the vehicle coordinate system.
Member Enumeration Documentation
◆ ReferencePoint
Definition of available reference points.
Left/middle/right and front/middle/rear indicate the position in y- and x-direction respectively. The z position is always considered as middle.
◆ MovementState
Information about a possible movement of the object during tracking.
Member Data Documentation
◆ header
| optional DetectedItemHeader osi3::DetectedMovingObject::header = 1 |
Common information of one detected item.
◆ base
| optional BaseMoving osi3::DetectedMovingObject::base = 2 |
The base parameters of the moving object.
- Note
- The bounding box does NOT include mirrors for vehicles.
- The height includes the ground_clearance. It always goes from the top to the ground.
◆ base_rmse
| optional BaseMoving osi3::DetectedMovingObject::base_rmse = 3 |
The root mean squared error of the base parameters of the detected moving object (e.g.
car). MovingObject::base has to be identical for all candidate moving objects.
◆ reference_point
| optional ReferencePoint osi3::DetectedMovingObject::reference_point = 4 |
Reference point location specification of the sensor measurement (required to decouple sensor measurement, position and bounding box estimation) as used by the sensor (model).
- Note
- Note that the value of this field has no impact on the value of object::position, which always references the center of the object / bounding box.
◆ movement_state
| optional MovementState osi3::DetectedMovingObject::movement_state = 5 |
Actual movement state w.r.t.
the moving object history.
◆ percentage_side_lane_left
| optional double osi3::DetectedMovingObject::percentage_side_lane_left = 6 |
Percentage side lane left.
Percentage value of the object width in the corresponding lane.
- Note
- DEPRECATED: Use assigned_lane_percentage in MovingObjectClassification instead.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 100
◆ percentage_side_lane_right
| optional double osi3::DetectedMovingObject::percentage_side_lane_right = 7 |
Percentage side lane right.
Percentage value of the object width in the corresponding lane.
- Note
- DEPRECATED: Use assigned_lane_percentage in MovingObjectClassification instead.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 100
◆ candidate
| repeated CandidateMovingObject osi3::DetectedMovingObject::candidate = 8 |
A list of candidates for this moving object as estimated by the sensor (e.g.
pedestrian, car).
◆ color_description
| optional ColorDescription osi3::DetectedMovingObject::color_description = 9 |
The dominating color of the material of the moving object.
◆ radar_specifics
| optional RadarSpecificObjectData osi3::DetectedMovingObject::radar_specifics = 100 |
Additional data that is specific to radar sensors.
- Note
- Field needs not to be set if simulated sensor is not a radar sensor.
◆ lidar_specifics
| optional LidarSpecificObjectData osi3::DetectedMovingObject::lidar_specifics = 101 |
Additional data that is specific to lidar sensors.
- Note
- Field needs not to be set if simulated sensor is not a lidar sensor.
◆ camera_specifics
| optional CameraSpecificObjectData osi3::DetectedMovingObject::camera_specifics = 102 |
Additional data that is specific to camera sensors.
- Note
- Field needs not to be set if simulated sensor is not a camera sensor.
◆ ultrasonic_specifics
| optional UltrasonicSpecificObjectData osi3::DetectedMovingObject::ultrasonic_specifics = 103 |
Additional data that is specific to ultrasonic sensors.
- Note
- Field needs not to be set if simulated sensor is not an ultrasonic sensor.
- osi_detectedobject.proto