osi3::MotionRequest::DesiredState Struct Reference
Public Attributes
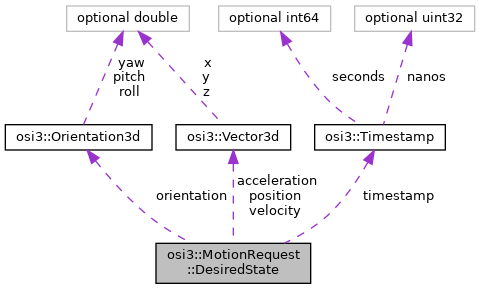
| optional Timestamp | timestamp = 1 |
A reference to Timestamp message. More... | |
| optional Vector3d | position = 2 |
| Intended position to be reached in in x-, y-, and z-direction. More... | |
| optional Orientation3d | orientation = 3 |
| Intended orientation to be reached containing yaw, pitch and roll angle. More... | |
| optional Vector3d | velocity = 4 |
| Intended velocity to be reached in in x-, y-, and z-direction. More... | |
| optional Vector3d | acceleration = 5 |
| Intended acceleration to be reached in x-, y-, and z-direction. More... | |
Detailed Description
The desired state is calculated by the function as a result of the motion planning stack.
The actuator management is supposed to reach the desired state at the specified time.
Member Data Documentation
◆ timestamp
| optional Timestamp osi3::MotionRequest::DesiredState::timestamp = 1 |
A reference to Timestamp message.
◆ position
| optional Vector3d osi3::MotionRequest::DesiredState::position = 2 |
Intended position to be reached in in x-, y-, and z-direction.
◆ orientation
| optional Orientation3d osi3::MotionRequest::DesiredState::orientation = 3 |
Intended orientation to be reached containing yaw, pitch and roll angle.
◆ velocity
| optional Vector3d osi3::MotionRequest::DesiredState::velocity = 4 |
Intended velocity to be reached in in x-, y-, and z-direction.
Unit: m/s
◆ acceleration
| optional Vector3d osi3::MotionRequest::DesiredState::acceleration = 5 |
Intended acceleration to be reached in x-, y-, and z-direction.
Unit: m/s^2
- osi_motionrequest.proto