osi3::TrafficAction::AcquireGlobalPositionAction Struct Reference
Public Attributes
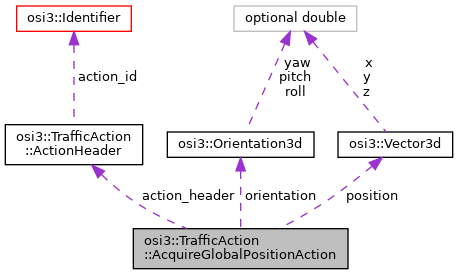
| optional ActionHeader | action_header = 1 |
| The action header. More... | |
| optional Vector3d | position = 2 |
| Position in the global coordinate system. More... | |
| optional Orientation3d | orientation = 3 |
| Orientation in the global coordinate system. More... | |
Detailed Description
Acquire global position action.
This action assigns a route to a traffic participant. The route assigned will be the shortest route (along roads or satisfying any other constraints a traffic participant is operating under) between the traffic participant's current position and the position specified.
As with all routing actions, the exact way this route is achieved is under the control of the traffic participant model.
- Note
- This action is aligned with the AcquirePositionAction of OpenSCENARIO 1.0 using a WorldPosition position argument.
Member Data Documentation
◆ action_header
| optional ActionHeader osi3::TrafficAction::AcquireGlobalPositionAction::action_header = 1 |
The action header.
◆ position
| optional Vector3d osi3::TrafficAction::AcquireGlobalPositionAction::position = 2 |
Position in the global coordinate system.
The position refers to the center (x,y,z) of the bounding box.
- Note
- Remark: The definition of the reference point follows the specification of the
BaseMovingmessage.
◆ orientation
| optional Orientation3d osi3::TrafficAction::AcquireGlobalPositionAction::orientation = 3 |
Orientation in the global coordinate system.
This is optional. If no orientation is given, the end orientation is under control of the traffic participant.
- osi_trafficcommand.proto