osi3::TrafficAction::LaneChangeAction Struct Reference
Public Attributes
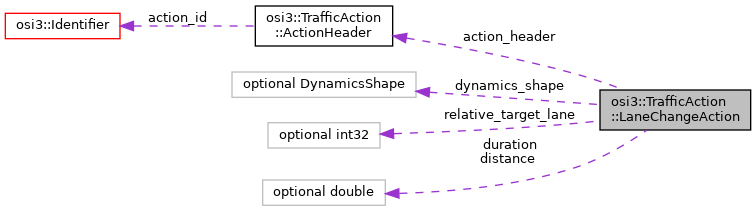
| optional ActionHeader | action_header = 1 |
| The action header. More... | |
| optional int32 | relative_target_lane = 2 |
| Targeted lane relative to the current lane. More... | |
| optional DynamicsShape | dynamics_shape = 3 |
| Specified shape of the lane change action. More... | |
| optional double | duration = 4 |
| Duration of the lane change. More... | |
| optional double | distance = 5 |
| Distance of the lane change. More... | |
Detailed Description
Lane change action.
This action assigns a lane change to a traffic participant. The fields of this message enable different levels of constraint for the traffic participant depending on the use case. In case the constraints are supposed to be small, the dynamics shape or even the duration and the distance for the lane change can be omitted.
- Note
- This action is aligned with LaneChangeAction of OpenSCENARIO 1.0 defining the targeted lane and optionally the parametrization of the lane change.
Member Data Documentation
◆ action_header
| optional ActionHeader osi3::TrafficAction::LaneChangeAction::action_header = 1 |
The action header.
◆ relative_target_lane
| optional int32 osi3::TrafficAction::LaneChangeAction::relative_target_lane = 2 |
Targeted lane relative to the current lane.
Convention: +1 means to the right, -1 means to the left.
◆ dynamics_shape
| optional DynamicsShape osi3::TrafficAction::LaneChangeAction::dynamics_shape = 3 |
Specified shape of the lane change action.
If the shape is unspecified (enum value 0), the shape of the lane change is open to the traffic participant model.
◆ duration
| optional double osi3::TrafficAction::LaneChangeAction::duration = 4 |
Duration of the lane change.
A value of 0.0 (the default value) imposes no constraint on the duration, unless the dynamics shape is a step function, where an immediate step is effected.
Unit: s
◆ distance
| optional double osi3::TrafficAction::LaneChangeAction::distance = 5 |
Distance of the lane change.
A value of 0.0 (the default value) imposes no constraint on the distance, unless the dynamics shape is a step function, where an immediate step is effected.
Unit: m
- osi_trafficcommand.proto