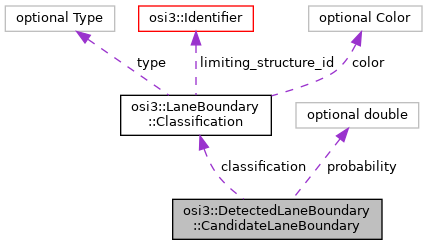
osi3::DetectedLaneBoundary::CandidateLaneBoundary Struct Reference
Public Attributes
| optional double | probability = 1 |
| The estimated probability that this candidate is the true value. More... | |
| optional LaneBoundary::Classification | classification = 2 |
| The classification of one lane boundary that defines this candidate. More... | |
Member Data Documentation
◆ probability
| optional double osi3::DetectedLaneBoundary::CandidateLaneBoundary::probability = 1 |
The estimated probability that this candidate is the true value.
- Note
- The sum of all
probabilitymust be one. This probability is given under the condition ofDetectedItemHeader::existence_probability.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 1
◆ classification
| optional LaneBoundary::Classification osi3::DetectedLaneBoundary::CandidateLaneBoundary::classification = 2 |
The classification of one lane boundary that defines this candidate.
- Note
- IDs, which are referenced in this message, usually reference to
DetectedXXX::tracking_idIDs.
- osi_detectedlane.proto