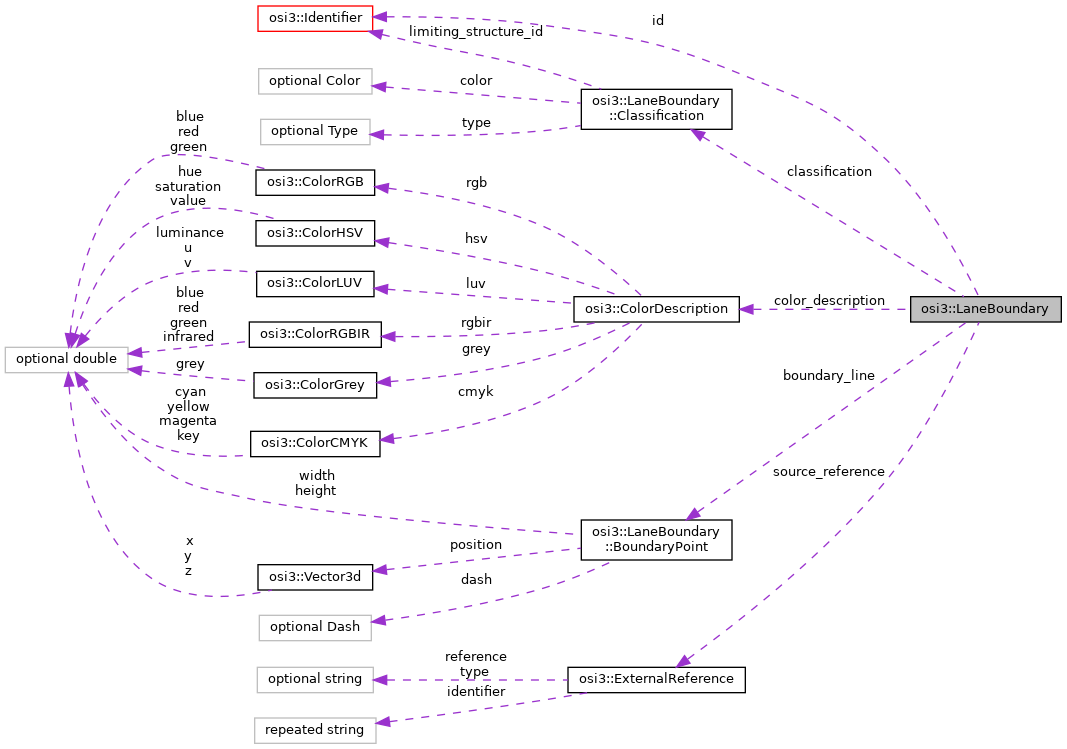
osi3::LaneBoundary Struct Reference
Classes
| struct | BoundaryPoint |
| A single point of a lane boundary. More... | |
| struct | Classification |
Classification of a lane boundary. More... | |
Public Attributes
| optional Identifier | id = 1 |
| The ID of the lane boundary. More... | |
| repeated BoundaryPoint | boundary_line = 2 |
| The list of individual points defining the location of the lane boundary (as a list of segments). More... | |
| optional Classification | classification = 3 |
| The classification of the lane boundary. More... | |
| repeated ExternalReference | source_reference = 4 |
| Optional external reference to the lane boundary source. More... | |
| optional ColorDescription | color_description = 5 |
| The visual color of the material of the lane boundary. More... | |
Detailed Description
A lane boundary defining the border of a lane.
The left and right lane boundary define the width of the lane. Additionally, free markings can be defined, e.g. at construction sites. Free markings across multiple lanes may be defined multiple times for all affected lanes.
- Note
- In the example, the symbols l1, l2, ... and lb1, lb2, ... stand for the lane ids and lane boundary ids respectively, i.e. for integers (uint64). The symbols bp2_{i+1}, bp2_{i}, bp2_{i-1} stand for
osi3::LaneBoundary::BoundaryPointelements.
Member Data Documentation
◆ id
| optional Identifier osi3::LaneBoundary::id = 1 |
The ID of the lane boundary.
- Rules
- is_globally_unique
◆ boundary_line
| repeated BoundaryPoint osi3::LaneBoundary::boundary_line = 2 |
The list of individual points defining the location of the lane boundary (as a list of segments).
Since a BoundaryPoint is part of a sequence, only the position attribute has to be set for each instance. All other values will be reused from the previous BoundaryPoint in the sequence or set to default values if there is none or it was never set.
Example: The boundary_line of the LaneBoundary with id lb2 is given by (bp2_1, ..., bp2_{i-1}, bp2_{i}, bp2_{i+1}, ...).
- Attention
- The ordering of the points must be the same for all lane boundaries on one road (also for roads with two-way traffic) and also the center line(s). Example: If the points are deducted from a map format, the order of points is recommended to be in line with the road coordinate (e.g. s-coordinate in OpenDRIVE).
- Note
- For dashed lines, one
BoundaryPointhas to be at the start and another at the end of each dashed line segment. The firstBoundaryPointdefines the beginning of the first dashed lane marking. The lastBoundaryPointdefines the end of the last dashed lane marking. -
For Botts' dots lines, one
BoundaryPointposition has to define each Botts' dot.
- Attention
- For
BoundaryPointthe same rule for the approximation error applies as forLane::Classification::centerline.
- Rules
- first_element width is_equal_to 0.13first_element height is_equal_to 0.14last_element width is_equal_to 0.13last_element height is_equal_to 0.13
◆ classification
| optional Classification osi3::LaneBoundary::classification = 3 |
The classification of the lane boundary.
◆ source_reference
| repeated ExternalReference osi3::LaneBoundary::source_reference = 4 |
Optional external reference to the lane boundary source.
- Note
- For OpenDRIVE, there is no direct possibility to reference the RoadMark, as there is no unique identifier in this sub-object.
- For non-ASAM Standards, it is implementation-specific how source_reference is resolved.
- The value has to be repeated because one object may be derived from more than one origin source, for example, from a scenario file and from sensors.
◆ color_description
| optional ColorDescription osi3::LaneBoundary::color_description = 5 |
The visual color of the material of the lane boundary.
- Note
- This does not represent the semantic classification but the visual appearance. For semantic classification of the lane boundary use the color field in
Classification.
- osi_lane.proto