osi3::FeatureData Struct Reference
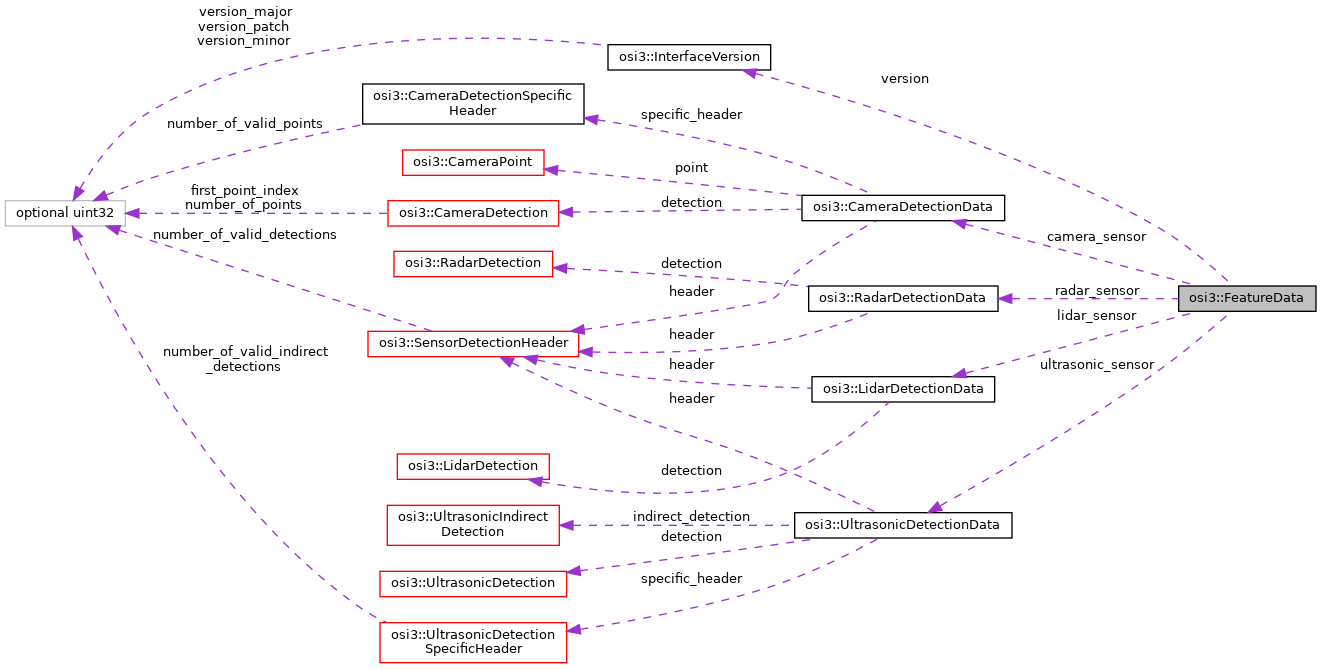
Public Attributes
| optional InterfaceVersion | version = 1 |
| The interface version used by the sender (i.e. More... | |
| repeated RadarDetectionData | radar_sensor = 2 |
| Radar detections for multiple radar sensors (sensor fusion). More... | |
| repeated LidarDetectionData | lidar_sensor = 3 |
| Lidar detections for multiple lidar sensors (sensor fusion). More... | |
| repeated UltrasonicDetectionData | ultrasonic_sensor = 4 |
| Ultrasonic detections for multiple ultrasonic sensors (sensor fusion). More... | |
| repeated CameraDetectionData | camera_sensor = 5 |
| Camera detections for multiple camera sensors (sensor fusion). More... | |
Detailed Description
Interface for sensor data containing information without a history in contrast to interpreted data after object hypothesis and tracking.
All information regarding the environment is given with respect to the sensor coordinate system specified in SensorDetectionHeader::mounting_position. When simulating multiple sensors, each sensor has an individual copy of FeatureData in its own reference frame. This allows an independent treatment of the sensors.
Member Data Documentation
◆ version
| optional InterfaceVersion osi3::FeatureData::version = 1 |
The interface version used by the sender (i.e.
the simulation environment).
◆ radar_sensor
| repeated RadarDetectionData osi3::FeatureData::radar_sensor = 2 |
Radar detections for multiple radar sensors (sensor fusion).
◆ lidar_sensor
| repeated LidarDetectionData osi3::FeatureData::lidar_sensor = 3 |
Lidar detections for multiple lidar sensors (sensor fusion).
◆ ultrasonic_sensor
| repeated UltrasonicDetectionData osi3::FeatureData::ultrasonic_sensor = 4 |
Ultrasonic detections for multiple ultrasonic sensors (sensor fusion).
- Note
- Required for ultrasonic sensors: Detections will be send by the emitting ultrasonic sensor, including all indirect detections received by neighbouring sensors.
◆ camera_sensor
| repeated CameraDetectionData osi3::FeatureData::camera_sensor = 5 |
Camera detections for multiple camera sensors (sensor fusion).
- osi_featuredata.proto