osi3::DetectedTrafficSign::DetectedSupplementarySign Struct Reference
Classes
| struct | CandidateSupplementarySign |
| A candidate for a detected supplementary sign as estimated by the sensor. More... | |
Public Attributes
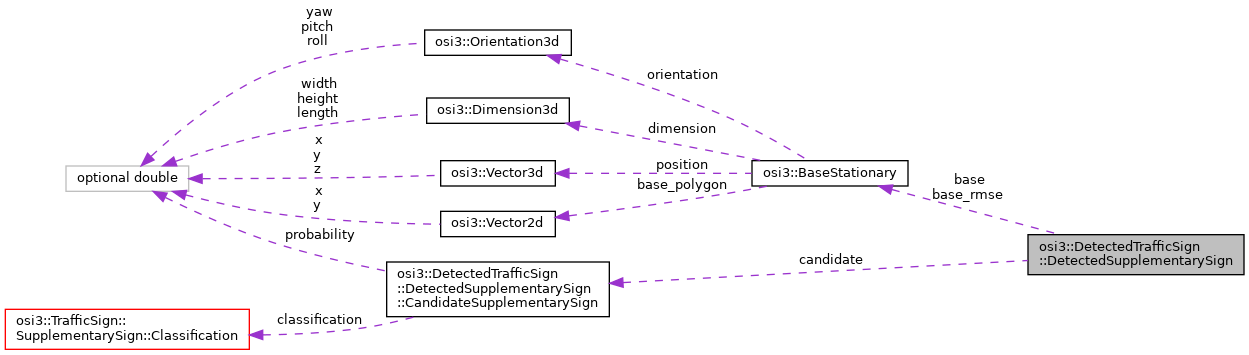
| repeated CandidateSupplementarySign | candidate = 1 |
| The definition of one of more supplementary signs that together define this candidate. More... | |
| optional BaseStationary | base = 2 |
| The base parameters of the supplementary traffic sign. More... | |
| optional BaseStationary | base_rmse = 3 |
| The root mean squared error of the base parameters of the detected supplementary traffic sign. More... | |
Detailed Description
Candidates for all detected supplementary signs of one traffic sign as estimated by the sensor.
Member Data Documentation
◆ candidate
| repeated CandidateSupplementarySign osi3::DetectedTrafficSign::DetectedSupplementarySign::candidate = 1 |
The definition of one of more supplementary signs that together define this candidate.
- Note
- OSI uses singular instead of plural for repeated field names.
◆ base
| optional BaseStationary osi3::DetectedTrafficSign::DetectedSupplementarySign::base = 2 |
The base parameters of the supplementary traffic sign.
The orientation of the bounding box SupplementarySign::base ( BaseStationary::orientation ) is defined as follows: The z-axis of the given BaseStationary::orientation is the vector from the bottom to the top of the supplementary traffic sign's 2D image plate. (Normally it is equal to the ground truth z-axis.) The x-axis of the given BaseStationary::orientation is view normal of the supplementary traffic sign's image. This x-axis points from the supplementary traffic sign's image in the direction from where a 'viewer' could see the supplementary traffic sign image.
◆ base_rmse
| optional BaseStationary osi3::DetectedTrafficSign::DetectedSupplementarySign::base_rmse = 3 |
The root mean squared error of the base parameters of the detected supplementary traffic sign.
candidate TrafficSign::SupplementarySign::base has to be identical for all candidate supplementary traffic signs.
- osi_detectedtrafficsign.proto