osi3::LidarDetection Struct Reference
Public Attributes
| optional double | existence_probability = 1 |
| Existence probability of the detection not based on history. More... | |
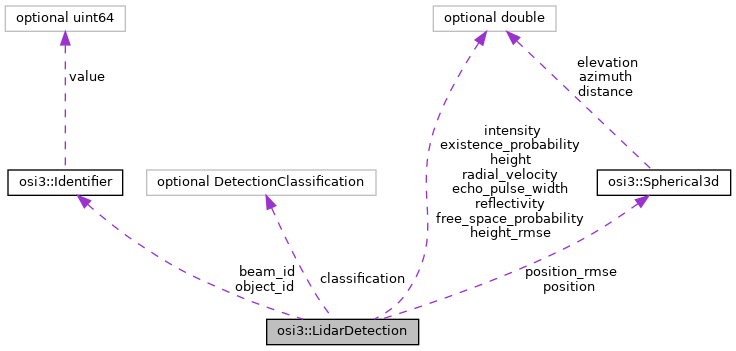
| optional Identifier | object_id = 2 |
| ID of the detected object this detection is associated to. More... | |
| optional Spherical3d | position = 3 |
| Measured position of the detection given in spherical coordinates in the sensor coordinate system. More... | |
| optional Spherical3d | position_rmse = 4 |
| Root mean squared error of the measured position of the detection. More... | |
| optional double | height = 5 |
| The height value which is required when multiple scan points are vertically clustered. More... | |
| optional double | height_rmse = 6 |
| Root mean squared error of the object height. More... | |
| optional double | intensity = 7 |
| Intensity or equivalent value of the detection's echo. More... | |
| optional double | free_space_probability = 8 |
| The free space probability in the range [0.0, 1.0] from the origin of the sensor up to this detection, as given by the distance. More... | |
| optional DetectionClassification | classification = 9 |
| Basic classification of the detection. More... | |
| optional double | reflectivity = 10 |
| Lambertian reflectivity. More... | |
| optional double | echo_pulse_width = 11 |
| Echo pulse width of the detection's echo. More... | |
| optional double | radial_velocity = 12 |
| Radial velocity of the detection positive in direction to the sensor. More... | |
| optional Identifier | beam_id = 13 |
| ID of the corresponding lidar beam. More... | |
Member Data Documentation
◆ existence_probability
| optional double osi3::LidarDetection::existence_probability = 1 |
Existence probability of the detection not based on history.
Value does not depend on any past experience with similar detections.
- Note
- Used as confidence measure where a low value means less confidence and a high value indicates strong confidence.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 1
◆ object_id
| optional Identifier osi3::LidarDetection::object_id = 2 |
ID of the detected object this detection is associated to.
- Note
- ID = MAX(uint64) indicates no reference to an object.
◆ position
| optional Spherical3d osi3::LidarDetection::position = 3 |
Measured position of the detection given in spherical coordinates in the sensor coordinate system.
◆ position_rmse
| optional Spherical3d osi3::LidarDetection::position_rmse = 4 |
Root mean squared error of the measured position of the detection.
◆ height
| optional double osi3::LidarDetection::height = 5 |
The height value which is required when multiple scan points are vertically clustered.
Only vertical clustering is allowed (z-axis).
Unit: m
- Rules
- is_greater_than_or_equal_to: 0
◆ height_rmse
| optional double osi3::LidarDetection::height_rmse = 6 |
Root mean squared error of the object height.
Unit: m
- Rules
- is_greater_than_or_equal_to: 0
◆ intensity
| optional double osi3::LidarDetection::intensity = 7 |
Intensity or equivalent value of the detection's echo.
Unit: %
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 100
◆ free_space_probability
| optional double osi3::LidarDetection::free_space_probability = 8 |
The free space probability in the range [0.0, 1.0] from the origin of the sensor up to this detection, as given by the distance.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 1
◆ classification
| optional DetectionClassification osi3::LidarDetection::classification = 9 |
Basic classification of the detection.
◆ reflectivity
| optional double osi3::LidarDetection::reflectivity = 10 |
Lambertian reflectivity.
◆ echo_pulse_width
| optional double osi3::LidarDetection::echo_pulse_width = 11 |
Echo pulse width of the detection's echo.
Several sensors output an echo pulse width instead of an intensity for each individual detection. The echo pulse is measured in m and measures the extent of the object parts or atmospheric particles that produce the echo.
- Note
- For more details see [1] Fig. 7 and 8.
- Fig. 7 shows an example where the two echos are reflected from the edges A-B and C-D.
- Fig. 8 shows how the echo pulse width is measured as the range between the rising edge and the falling edge that crosses the intensity threshold.
Unit: m
- Rules
- is_greater_than_or_equal_to: 0
- Reference:
- [1] Rosenberger, P., Holder, M.F., Cianciaruso, N. et al. (2020). Sequential lidar sensor system simulation: a modular approach for simulation-based safety validation of automated driving Automotive Engine Technology 5, Fig 7, Fig 8. Retrieved May 10, 2021, from https://doi.org/10.1007/s41104-020-00066-x
◆ radial_velocity
| optional double osi3::LidarDetection::radial_velocity = 12 |
Radial velocity of the detection positive in direction to the sensor.
Unit: m/s
◆ beam_id
| optional Identifier osi3::LidarDetection::beam_id = 13 |
ID of the corresponding lidar beam.
- osi_featuredata.proto