osi3::DetectedItemHeader Struct Reference
Public Types
| enum | MeasurementState { MEASUREMENT_STATE_UNKNOWN = 0, MEASUREMENT_STATE_OTHER = 1, MEASUREMENT_STATE_MEASURED = 2, MEASUREMENT_STATE_PREDICTED = 3 } |
| Definition of measurement states. More... | |
Public Attributes
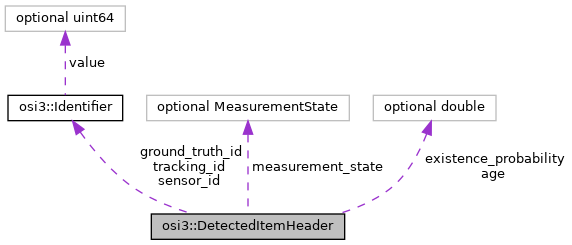
| optional Identifier | tracking_id = 1 |
| Specific ID of the detected item as assigned by the sensor internally. More... | |
| repeated Identifier | ground_truth_id = 2 |
| The ID of the original detected item in the ground truth. More... | |
| optional double | existence_probability = 3 |
| The estimated probability that this detected item really exists, not based on history. More... | |
| optional double | age = 4 |
| The amount of time that this detected object has been continuously observed/tracked. More... | |
| optional MeasurementState | measurement_state = 5 |
| The measurement state. More... | |
| repeated Identifier | sensor_id = 6 |
| A list of physical sensors which detected this detected item. More... | |
Member Enumeration Documentation
◆ MeasurementState
Definition of measurement states.
Member Data Documentation
◆ tracking_id
| optional Identifier osi3::DetectedItemHeader::tracking_id = 1 |
Specific ID of the detected item as assigned by the sensor internally.
Needs not to match with ground_truth_id.
- Rules
- is_set
◆ ground_truth_id
| repeated Identifier osi3::DetectedItemHeader::ground_truth_id = 2 |
The ID of the original detected item in the ground truth.
◆ existence_probability
| optional double osi3::DetectedItemHeader::existence_probability = 3 |
The estimated probability that this detected item really exists, not based on history.
- Note
- Use as confidence measure where a low value means less confidence and a high value indicates strong confidence.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 1
◆ age
| optional double osi3::DetectedItemHeader::age = 4 |
The amount of time that this detected object has been continuously observed/tracked.
- Note
- \( Timestamp - Age := \) 'point in time' when the object has been observed for the first time.
Unit: s
◆ measurement_state
| optional MeasurementState osi3::DetectedItemHeader::measurement_state = 5 |
The measurement state.
◆ sensor_id
| repeated Identifier osi3::DetectedItemHeader::sensor_id = 6 |
A list of physical sensors which detected this detected item.
If SensorData has detected entities and all detections are missing, then e.g. the number of sensors can confirm the existence_probability.
- Note
- This information can be determined via the detected entities' detections (
...Detection::object_id = 'this detected item' ) and the sensors (their IDs) to which these detections belong.
- osi_detectedobject.proto