osi3::MovingObject::PedestrianAttributes::Bone Struct Reference
Public Types
| enum | Type { TYPE_ROOT = 0, TYPE_HIP = 1, TYPE_LOWER_SPINE = 2, TYPE_UPPER_SPINE = 3, TYPE_NECK = 4, TYPE_HEAD = 5, TYPE_SHOULDER_L = 6, TYPE_SHOULDER_R = 7, TYPE_UPPER_ARM_L = 8, TYPE_UPPER_ARM_R = 9, TYPE_LOWER_ARM_L = 10, TYPE_LOWER_ARM_R = 11, TYPE_FULL_HAND_L = 12, TYPE_FULL_HAND_R = 13, TYPE_UPPER_LEG_L = 14, TYPE_UPPER_LEG_R = 15, TYPE_LOWER_LEG_L = 16, TYPE_LOWER_LEG_R = 17, TYPE_FULL_FOOT_L = 18, TYPE_FULL_FOOT_R = 19 } |
| The type of the bone. More... | |
Public Attributes
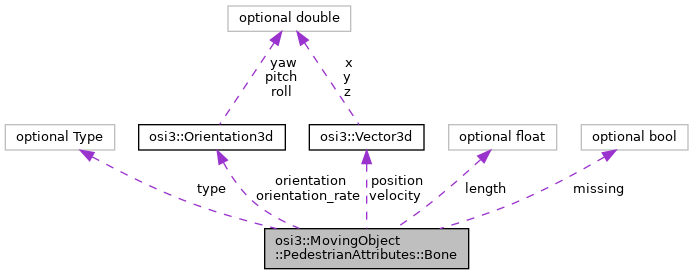
| optional Type | type = 1 |
| Bones are identified by their type, combined with which body side they are on. More... | |
| optional Vector3d | position = 2 |
| Position of the bone. More... | |
| optional Orientation3d | orientation = 3 |
| Orientation of the bone. More... | |
| optional float | length = 4 |
| Length of the bone. More... | |
| optional bool | missing = 5 |
| Determines whether a bone is explicitly missing from the pedestrian model. More... | |
| optional Vector3d | velocity = 6 |
| The velocity of the bone. More... | |
| optional Orientation3d | orientation_rate = 7 |
| The orientation rate of the bone. More... | |
Detailed Description
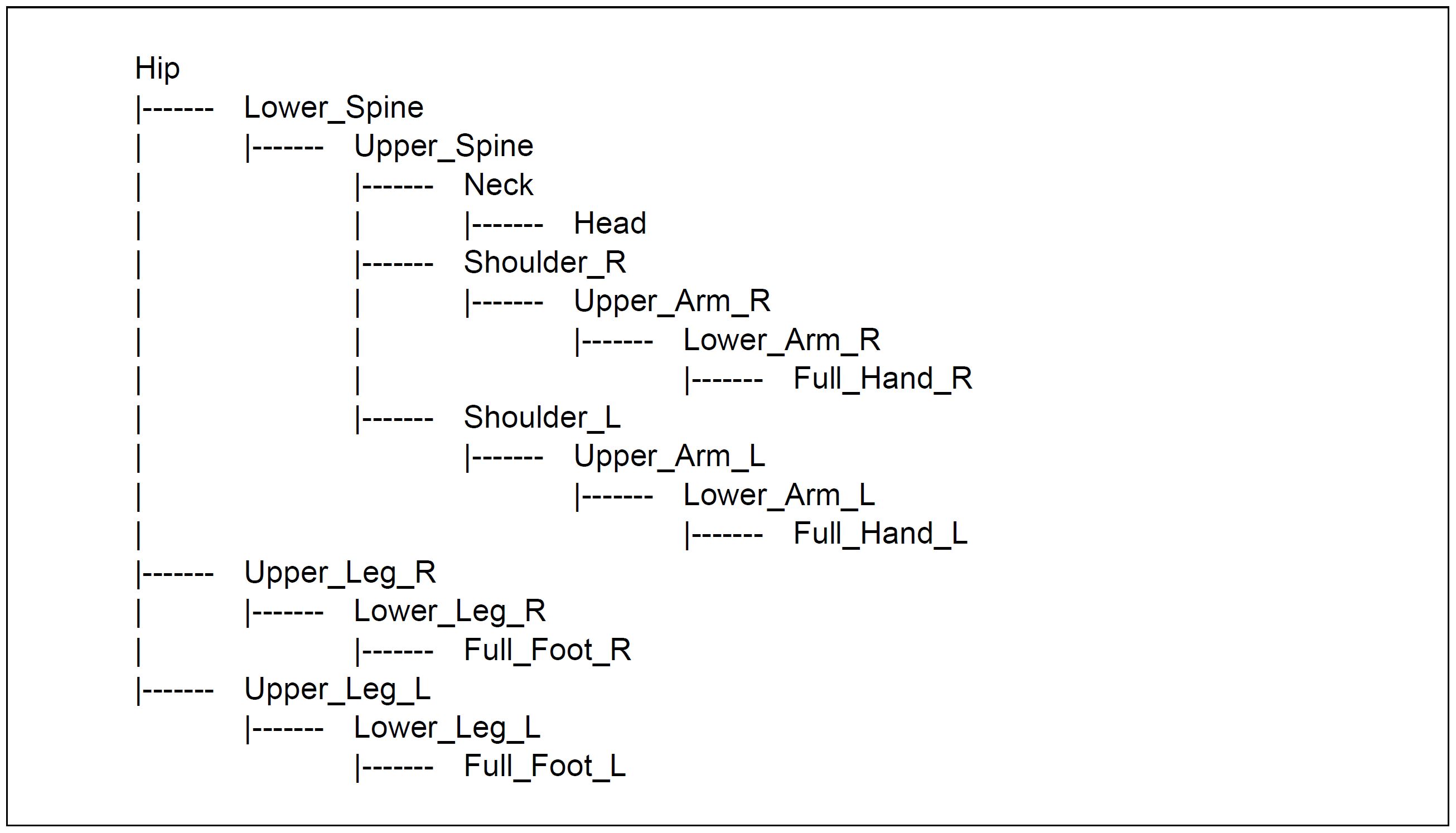
Bones in the skeleton of the pedestrian.
Each point represents a joint, or otherwise important point in the skeleton of a pedestrian. For example pelvis, knee or shoulder. The naming convention should be followed for identifying bones.
Member Enumeration Documentation
◆ Type
The type of the bone.
| Enumerator | |
|---|---|
| TYPE_ROOT | Root point of the pedestrian. Defined by bbcenter_to_root ( |
| TYPE_HIP | Bone defining the hip. |
| TYPE_LOWER_SPINE | Bone defining the lower part of the spine. |
| TYPE_UPPER_SPINE | Bone defining the upper part of the spine. |
| TYPE_NECK | Bone defining the neck. |
| TYPE_HEAD | Bone defining the head. |
| TYPE_SHOULDER_L | Bone defining the left shoulder. |
| TYPE_SHOULDER_R | Bone defining the right shoulder. |
| TYPE_UPPER_ARM_L | Bone defining the left upper arm. |
| TYPE_UPPER_ARM_R | Bone defining the right upper arm. |
| TYPE_LOWER_ARM_L | Bone defining the left forearm. |
| TYPE_LOWER_ARM_R | Bone defining the right forearm. |
| TYPE_FULL_HAND_L | Bone defining the left hand. |
| TYPE_FULL_HAND_R | Bone defining the right hand. |
| TYPE_UPPER_LEG_L | Bone defining the left thigh. |
| TYPE_UPPER_LEG_R | Bone defining the right thigh. |
| TYPE_LOWER_LEG_L | Bone defining the left shin. |
| TYPE_LOWER_LEG_R | Bone defining the right shin. |
| TYPE_FULL_FOOT_L | Bone defining the left foot. |
| TYPE_FULL_FOOT_R | Bone defining the right foot. |
Member Data Documentation
◆ type
| optional Type osi3::MovingObject::PedestrianAttributes::Bone::type = 1 |
Bones are identified by their type, combined with which body side they are on.
To properly identify the bones the pre-defined naming convention must be used.
A bone's name, position, and orientation is defined by the end-point closer to the root. For example: the "LOWER_ARM_L" will define the point in the left elbow of the model.
If a bone which is more than one layer detached from the root point is used, all bones between that bone and the root also need to be defined in order to create a complete chain!
If information about bones are missing, they may be left empty.
◆ position
| optional Vector3d osi3::MovingObject::PedestrianAttributes::Bone::position = 2 |
Position of the bone.
Reference System is the root, defined by bbcenter_to_root (PedestrianAttributes::bbcenter_to_root).
◆ orientation
| optional Orientation3d osi3::MovingObject::PedestrianAttributes::Bone::orientation = 3 |
Orientation of the bone.
Reference System is the root, defined by bbcenter_to_root (PedestrianAttributes::bbcenter_to_root).
◆ length
| optional float osi3::MovingObject::PedestrianAttributes::Bone::length = 4 |
Length of the bone.
Measured along its major axis.
Unit: m
◆ missing
| optional bool osi3::MovingObject::PedestrianAttributes::Bone::missing = 5 |
Determines whether a bone is explicitly missing from the pedestrian model.
In case a pedestrian has missing limbs this can be explicitly communicated by setting this boolean to TRUE.
◆ velocity
| optional Vector3d osi3::MovingObject::PedestrianAttributes::Bone::velocity = 6 |
The velocity of the bone.
Reference System is the root, defined by bbcenter_to_root (PedestrianAttributes::bbcenter_to_root).
◆ orientation_rate
| optional Orientation3d osi3::MovingObject::PedestrianAttributes::Bone::orientation_rate = 7 |
The orientation rate of the bone.
Reference System is the root, defined by bbcenter_to_root (PedestrianAttributes::bbcenter_to_root).
- osi_object.proto