osi3::MotionRequest::DesiredTrajectory Struct Reference
Public Attributes
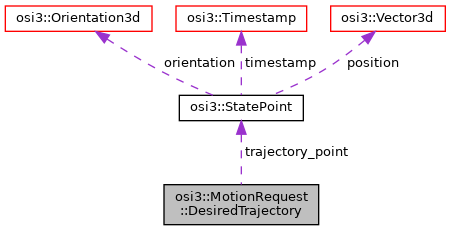
| repeated StatePoint | trajectory_point = 1 |
| The trajectory consists of intended position (x, y, and z) and orientation (yaw, pitch and roll) of intended state to be reached. More... | |
Detailed Description
Defined trajectory desired by the function.
This trajectory is the result of the trajectory planning step in the function. The task of the actuator management is to follow this trajectory as closely as possible. The timestamps inside the trajectory must be defined in global simulation time.
- Note
- The trajectory is kept as a separate message for future extensions.
Member Data Documentation
◆ trajectory_point
| repeated StatePoint osi3::MotionRequest::DesiredTrajectory::trajectory_point = 1 |
The trajectory consists of intended position (x, y, and z) and orientation (yaw, pitch and roll) of intended state to be reached.
A reference to StatePoint message.
- Note
- The position within the trajectory point references to the middle point of the rear axis.
- osi_motionrequest.proto