osi3::UltrasonicDetection Struct Reference
Public Attributes
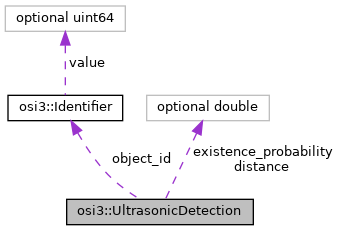
| optional double | existence_probability = 1 |
| Existence probability of the detection not based on history. More... | |
| optional Identifier | object_id = 2 |
| ID of the detected object this detection is associated to. More... | |
| optional double | distance = 3 |
| Measured distance (radius) of the detection. More... | |
Detailed Description
Ultrasonic detection from the sensor (same sensor as sender and receiver).
Direct detections:
Sending: Ultrasonic Sensor ID 1
Receiving: Ultrasonic Sensor ID 1
- Note
- Direct detections lie on circles with the sensor as center.
Member Data Documentation
◆ existence_probability
| optional double osi3::UltrasonicDetection::existence_probability = 1 |
Existence probability of the detection not based on history.
Value does not depend on any past experience with similar detections.
- Note
- Used as confidence measure where a low value means less confidence and a high value indicates strong confidence.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 1
◆ object_id
| optional Identifier osi3::UltrasonicDetection::object_id = 2 |
ID of the detected object this detection is associated to.
- Note
- ID = MAX(uint64) indicates no reference to an object.
◆ distance
| optional double osi3::UltrasonicDetection::distance = 3 |
Measured distance (radius) of the detection.
Unit: m
- Rules
- is_greater_than_or_equal_to: 0
- osi_featuredata.proto