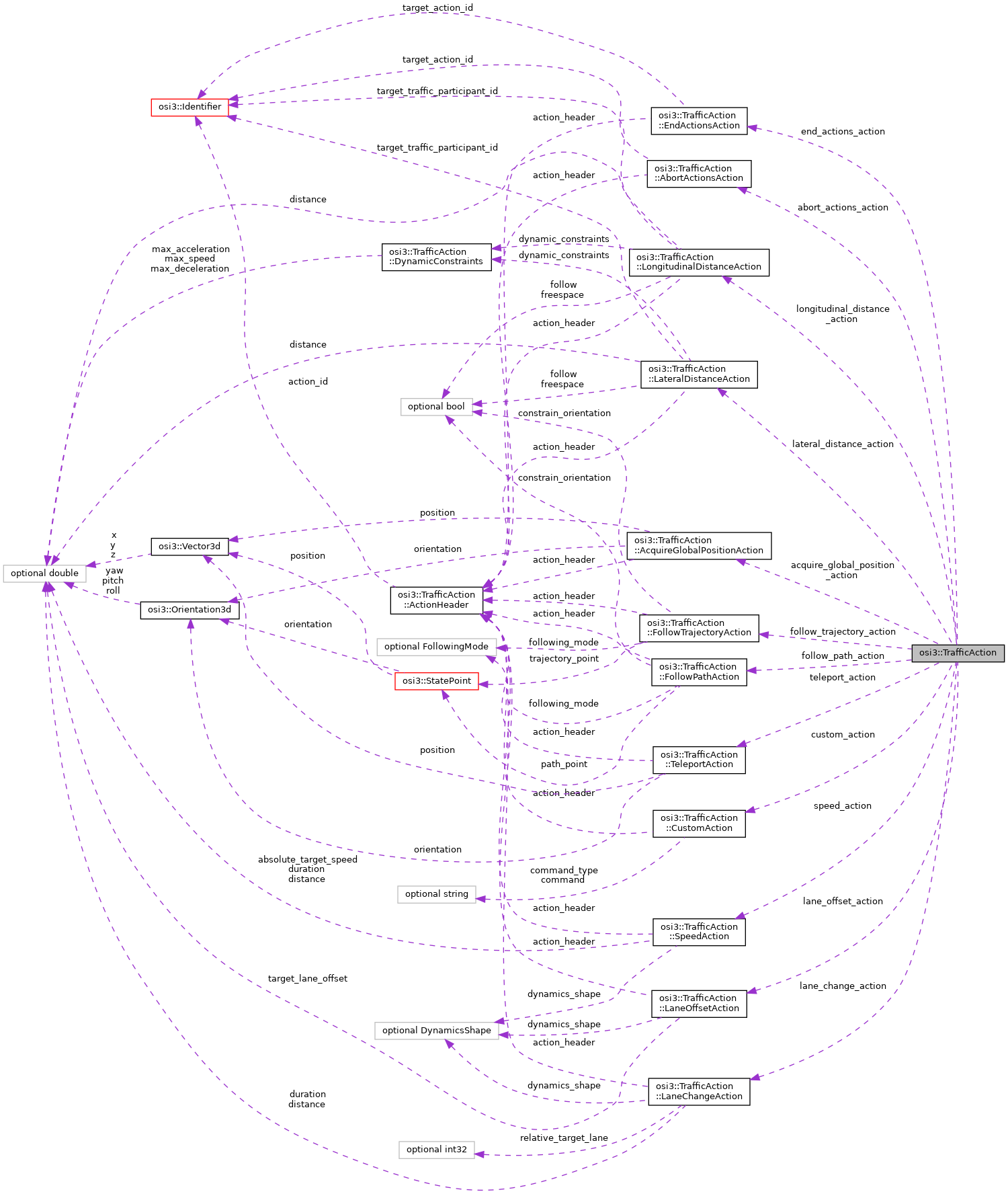
osi3::TrafficAction Struct Reference
Classes
| struct | AbortActionsAction |
| AbortActionsAction. More... | |
| struct | AcquireGlobalPositionAction |
| Acquire global position action. More... | |
| struct | ActionHeader |
| The action header. More... | |
| struct | CustomAction |
| Custom Action. More... | |
| struct | DynamicConstraints |
| DynamicConstraints. More... | |
| struct | EndActionsAction |
| End actions action. More... | |
| struct | FollowPathAction |
| Follow path action. More... | |
| struct | FollowTrajectoryAction |
| Follow trajectory action. More... | |
| struct | LaneChangeAction |
| Lane change action. More... | |
| struct | LaneOffsetAction |
| Lane Offset Action. More... | |
| struct | LateralDistanceAction |
| Lateral Distance Action. More... | |
| struct | LongitudinalDistanceAction |
| Longitudinal Distance Action. More... | |
| struct | SpeedAction |
| Speed action. More... | |
| struct | TeleportAction |
| Teleport Action. More... | |
Public Types
| enum | FollowingMode { FOLLOWING_MODE_POSITION = 0, FOLLOWING_MODE_FOLLOW = 1 } |
| Definition of following mode. More... | |
| enum | DynamicsShape { DYNAMICS_SHAPE_UNSPECIFIED = 0, DYNAMICS_SHAPE_LINEAR = 1, DYNAMICS_SHAPE_CUBIC = 2, DYNAMICS_SHAPE_SINUSOIDAL = 3, DYNAMICS_SHAPE_STEP = 4 } |
| Definition of dynamic shapes. More... | |
Public Attributes
| optional FollowTrajectoryAction | follow_trajectory_action = 1 |
| A FollowTrajectoryAction. More... | |
| optional FollowPathAction | follow_path_action = 2 |
| A FollowPathAction. More... | |
| optional AcquireGlobalPositionAction | acquire_global_position_action = 3 |
| An AcquireGlobalPositionAction. More... | |
| optional LaneChangeAction | lane_change_action = 4 |
| A LaneChangeAction. More... | |
| optional SpeedAction | speed_action = 5 |
| A SpeedAction. More... | |
| optional AbortActionsAction | abort_actions_action = 6 |
| An AbortActionsAction. More... | |
| optional EndActionsAction | end_actions_action = 7 |
| An EndActionsAction. More... | |
| optional CustomAction | custom_action = 8 |
| A CustomAction. More... | |
| optional LongitudinalDistanceAction | longitudinal_distance_action = 9 |
| A LongitudinalDistanceAction. More... | |
| optional LaneOffsetAction | lane_offset_action = 10 |
| A LaneOffsetAction. More... | |
| optional LateralDistanceAction | lateral_distance_action = 11 |
| A LateralDistanceAction. More... | |
| optional TeleportAction | teleport_action = 12 |
| A TeleportAction. More... | |
Detailed Description
Atomic traffic actions to be performed.
The transmitted commands are the atomic traffic actions described by this message.
- Note
- This message is notionally a multiple choice selection, that is, only certain combinations of atomic traffic actions shall be transmitted within certain time intervals, for example, for plausibity reasons. The restrictions regarding that are not part of this message, yet are seen as a task of the scenario description, for example, OpenSCENARIO.
-
All traffic actions are sent only once just before they are about to start. This is also true, if their execution is expected to take simulation time. To inform the traffic participant model that certain actions must or shall be terminated, there are explicit actions nested inside this message (AbortActionsAction, EndActionsAction), which hold a reference to the respective actions. Futhermore, there exists a
TrafficCommandUpdatemessage for the traffic participant to report back on potentially dismissed actions.
Member Enumeration Documentation
◆ FollowingMode
Definition of following mode.
◆ DynamicsShape
Member Data Documentation
◆ follow_trajectory_action
| optional FollowTrajectoryAction osi3::TrafficAction::follow_trajectory_action = 1 |
◆ follow_path_action
| optional FollowPathAction osi3::TrafficAction::follow_path_action = 2 |
◆ acquire_global_position_action
| optional AcquireGlobalPositionAction osi3::TrafficAction::acquire_global_position_action = 3 |
◆ lane_change_action
| optional LaneChangeAction osi3::TrafficAction::lane_change_action = 4 |
◆ speed_action
| optional SpeedAction osi3::TrafficAction::speed_action = 5 |
A SpeedAction.
◆ abort_actions_action
| optional AbortActionsAction osi3::TrafficAction::abort_actions_action = 6 |
◆ end_actions_action
| optional EndActionsAction osi3::TrafficAction::end_actions_action = 7 |
An EndActionsAction.
◆ custom_action
| optional CustomAction osi3::TrafficAction::custom_action = 8 |
A CustomAction.
◆ longitudinal_distance_action
| optional LongitudinalDistanceAction osi3::TrafficAction::longitudinal_distance_action = 9 |
◆ lane_offset_action
| optional LaneOffsetAction osi3::TrafficAction::lane_offset_action = 10 |
◆ lateral_distance_action
| optional LateralDistanceAction osi3::TrafficAction::lateral_distance_action = 11 |
◆ teleport_action
| optional TeleportAction osi3::TrafficAction::teleport_action = 12 |
- osi_trafficcommand.proto