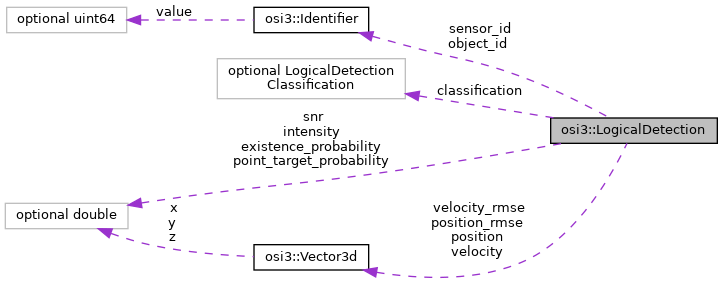
osi3::LogicalDetection Struct Reference
Public Attributes
| optional double | existence_probability = 1 |
| Existence probability of the logical detection. More... | |
| optional Identifier | object_id = 2 |
| ID of the detected object this logical detection is associated to. More... | |
| optional Vector3d | position = 3 |
| Measured position of the logical detection given in cartesian coordinates in the host vehicle coordinate system. More... | |
| optional Vector3d | position_rmse = 4 |
| Root mean squared error of the measured position of the logical detection. More... | |
| optional Vector3d | velocity = 5 |
| Velocity of the logical detection given in cartesian coordinates in the host vehicle coordinate system. More... | |
| optional Vector3d | velocity_rmse = 6 |
| Root mean squared error of the logical detection's velocity. More... | |
| optional double | intensity = 7 |
| Intensity or equivalent value of the logical detection's echo. More... | |
| optional double | snr = 8 |
| The signal to noise ratio (SNR) of the logical detection. More... | |
| optional double | point_target_probability = 9 |
| Describes the possibility whether more than one object may have led to this logical detection. More... | |
| repeated Identifier | sensor_id = 10 |
| The ID(s) of the sensor(s) that produced the detection(s) for transformation and - in case of multiple sensors - fusion into the single logical detection. More... | |
| optional LogicalDetectionClassification | classification = 11 |
| Basic classification of the logical detection. More... | |
Member Data Documentation
◆ existence_probability
| optional double osi3::LogicalDetection::existence_probability = 1 |
Existence probability of the logical detection.
- Note
- Use as confidence measure where a low value means less confidence and a high value indicates strong confidence.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 1
◆ object_id
| optional Identifier osi3::LogicalDetection::object_id = 2 |
ID of the detected object this logical detection is associated to.
- Note
- ID = MAX(uint64) indicates no reference to an object.
- Rules
- refers_to: DetectedObject
◆ position
| optional Vector3d osi3::LogicalDetection::position = 3 |
Measured position of the logical detection given in cartesian coordinates in the host vehicle coordinate system.
Unit: m
◆ position_rmse
| optional Vector3d osi3::LogicalDetection::position_rmse = 4 |
Root mean squared error of the measured position of the logical detection.
◆ velocity
| optional Vector3d osi3::LogicalDetection::velocity = 5 |
Velocity of the logical detection given in cartesian coordinates in the host vehicle coordinate system.
Unit: m/s
◆ velocity_rmse
| optional Vector3d osi3::LogicalDetection::velocity_rmse = 6 |
Root mean squared error of the logical detection's velocity.
Unit: m/s
- Rules
- is_greater_than_or_equal_to: 0
◆ intensity
| optional double osi3::LogicalDetection::intensity = 7 |
Intensity or equivalent value of the logical detection's echo.
Unit: %
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 100
◆ snr
| optional double osi3::LogicalDetection::snr = 8 |
The signal to noise ratio (SNR) of the logical detection.
Unit: dB
◆ point_target_probability
| optional double osi3::LogicalDetection::point_target_probability = 9 |
Describes the possibility whether more than one object may have led to this logical detection.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 1
◆ sensor_id
| repeated Identifier osi3::LogicalDetection::sensor_id = 10 |
The ID(s) of the sensor(s) that produced the detection(s) for transformation and - in case of multiple sensors - fusion into the single logical detection.
- Note
- One logical detection can originate from multiple sensors.
◆ classification
| optional LogicalDetectionClassification osi3::LogicalDetection::classification = 11 |
Basic classification of the logical detection.
- osi_logicaldetectiondata.proto