osi3::DetectedLaneBoundary Struct Reference
Classes
| struct | CandidateLaneBoundary |
| A candidate for a detected lane boundary as estimated by the sensor. More... | |
Public Attributes
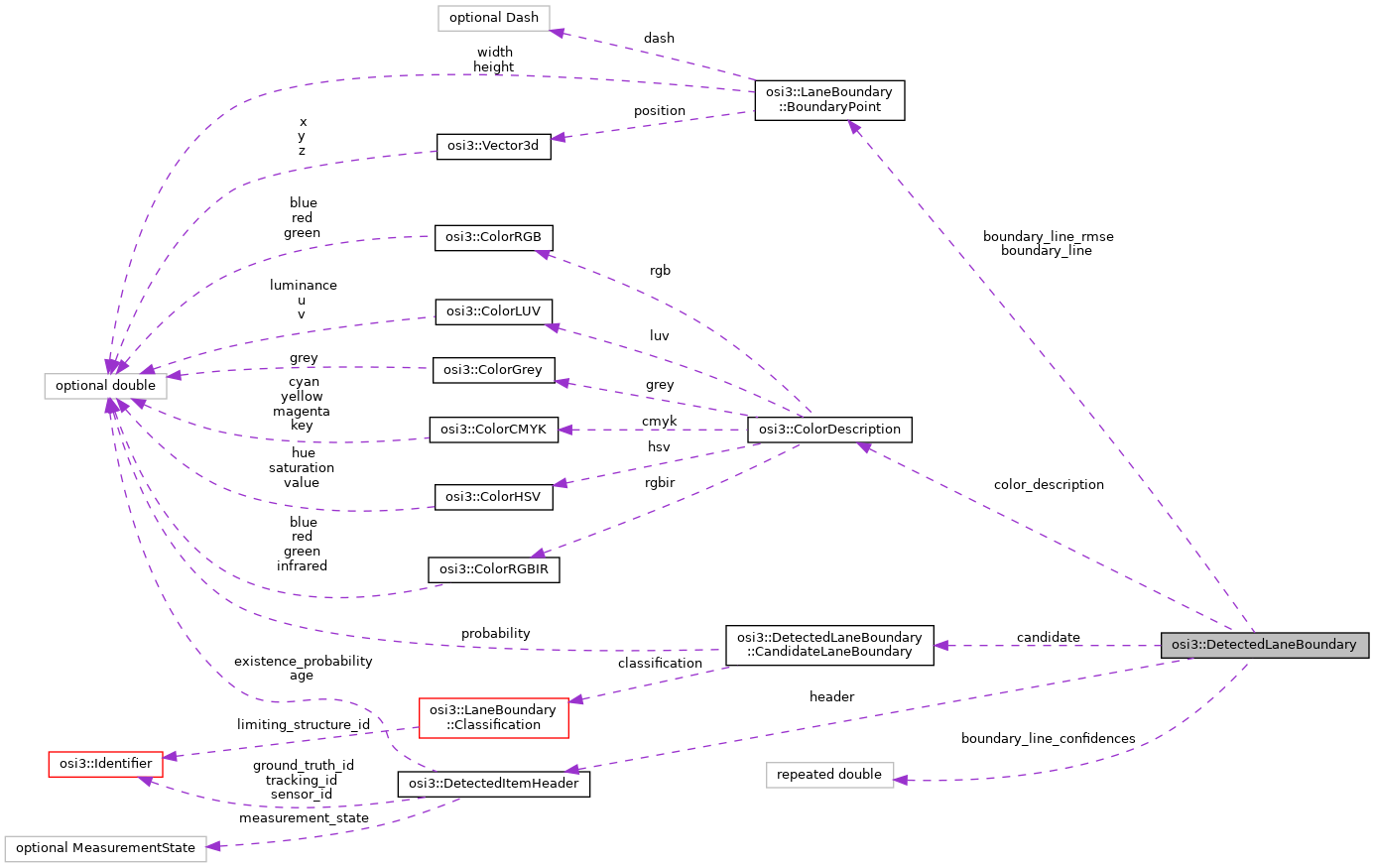
| optional DetectedItemHeader | header = 1 |
| Common information of one detected item. More... | |
| repeated CandidateLaneBoundary | candidate = 2 |
| A list of candidates for this lane boundary as estimated by the sensor. More... | |
| repeated LaneBoundary::BoundaryPoint | boundary_line = 3 |
| The list of individual points defining the location of the lane boundary (as a list of segments). More... | |
| repeated LaneBoundary::BoundaryPoint | boundary_line_rmse = 4 |
The root mean squared error of the LaneBoundary::BoundaryPoint. More... | |
| repeated double | boundary_line_confidences = 5 |
Confidence of the segments of the LaneBoundary::BoundaryPoint. More... | |
| optional ColorDescription | color_description = 6 |
| The visual color of the material of the lane boundary. More... | |
Member Data Documentation
◆ header
| optional DetectedItemHeader osi3::DetectedLaneBoundary::header = 1 |
Common information of one detected item.
◆ candidate
| repeated CandidateLaneBoundary osi3::DetectedLaneBoundary::candidate = 2 |
A list of candidates for this lane boundary as estimated by the sensor.
◆ boundary_line
| repeated LaneBoundary::BoundaryPoint osi3::DetectedLaneBoundary::boundary_line = 3 |
The list of individual points defining the location of the lane boundary (as a list of segments).
Since a BoundaryPoint is part of a sequence, only the position attribute has to be set for each instance. All other values will be reused from the previous BoundaryPoint in the sequence or set to default values if there is none or it was never set. For dashed lines, one LaneBoundary::BoundaryPoint has to be at the start and another at the end of each dashed line segment. For Botts' dots lines, one LaneBoundary::BoundaryPoint position has to define each Botts' dot.
- Attention
- For
LaneBoundary::BoundaryPointthe same rules regarding maximum distance and approximation error apply as forLane::Classification::centerline.
◆ boundary_line_rmse
| repeated LaneBoundary::BoundaryPoint osi3::DetectedLaneBoundary::boundary_line_rmse = 4 |
The root mean squared error of the LaneBoundary::BoundaryPoint.
Each candidate has the same boundary_line points and exact one boundary_line_rmse rmse confidence value is specified which is suitable for all candidates.
◆ boundary_line_confidences
| repeated double osi3::DetectedLaneBoundary::boundary_line_confidences = 5 |
Confidence of the segments of the LaneBoundary::BoundaryPoint.
Each candidate has the same boundary_line points and exact one boundary_line_confidences confidence value is specified which is suitable for all candidates.
- Rules
- is_greater_than_or_equal_to: 0is_less_than_or_equal_to: 1
◆ color_description
| optional ColorDescription osi3::DetectedLaneBoundary::color_description = 6 |
The visual color of the material of the lane boundary.
- Note
- This does not represent the semantic classification but the visual appearance. For semantic classification of the lane boundary use the color field in
CandidateLaneBoundary::classification.
- osi_detectedlane.proto