osi3::DetectedStationaryObject Struct Reference
Classes
| struct | CandidateStationaryObject |
| A candidate for a detected stationary object as estimated by the sensor. More... | |
Public Attributes
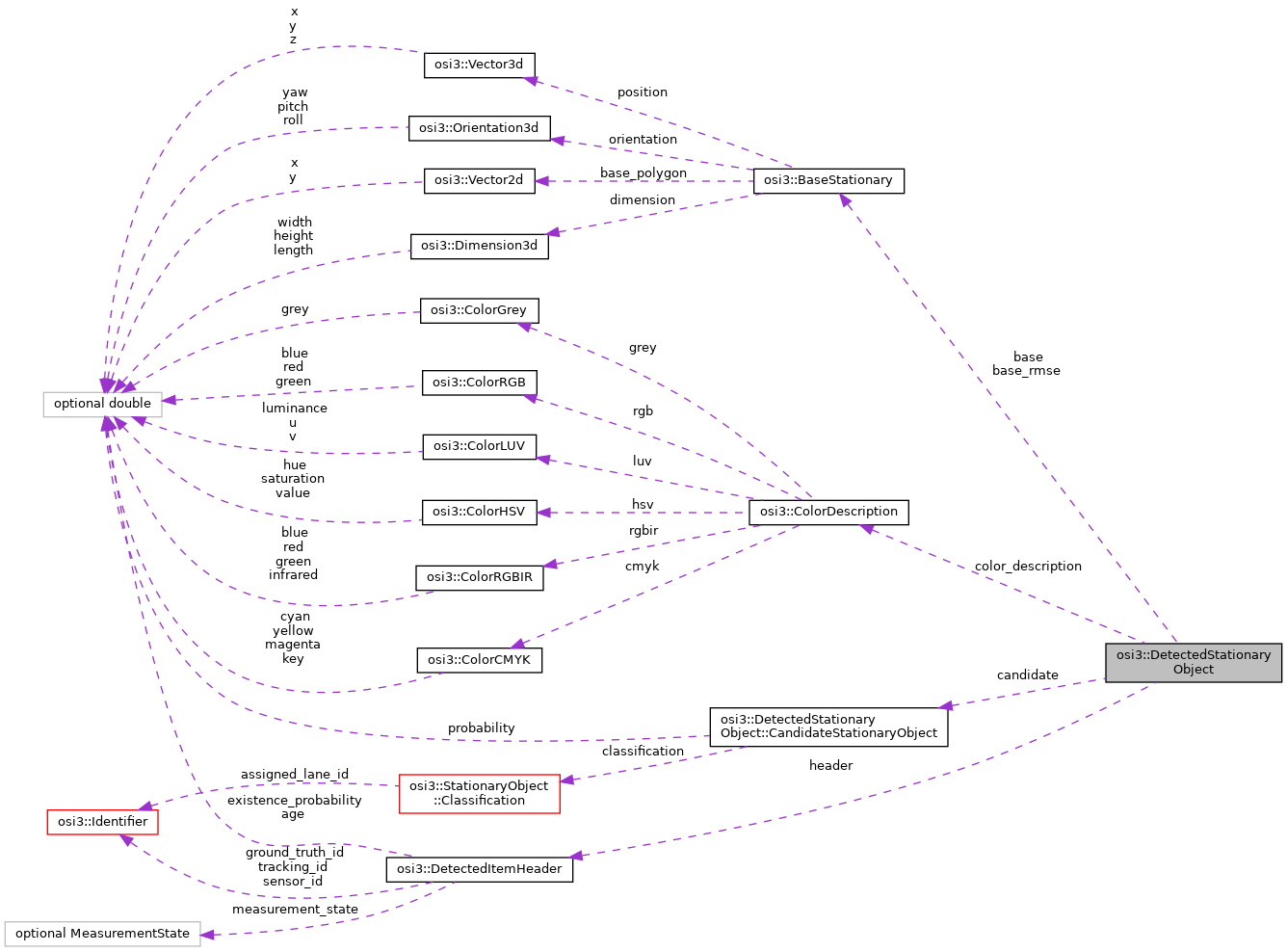
| optional DetectedItemHeader | header = 1 |
| Common information of one detected item. More... | |
| optional BaseStationary | base = 2 |
| The base parameters of the stationary object. More... | |
| optional BaseStationary | base_rmse = 3 |
| The root mean squared error of the base parameters of the detected stationary object (e.g. More... | |
| repeated CandidateStationaryObject | candidate = 4 |
| A list of candidates for this stationary object as estimated by the sensor. More... | |
| optional ColorDescription | color_description = 5 |
| The dominating color of the material of the structure. More... | |
Detailed Description
A stationary object (e.g.
landmark) in the environment as detected by the sensor.
Member Data Documentation
◆ header
| optional DetectedItemHeader osi3::DetectedStationaryObject::header = 1 |
Common information of one detected item.
◆ base
| optional BaseStationary osi3::DetectedStationaryObject::base = 2 |
The base parameters of the stationary object.
◆ base_rmse
| optional BaseStationary osi3::DetectedStationaryObject::base_rmse = 3 |
The root mean squared error of the base parameters of the detected stationary object (e.g.
landmark). StationaryObject::base has to be identical for all candidate stationary objects.
◆ candidate
| repeated CandidateStationaryObject osi3::DetectedStationaryObject::candidate = 4 |
A list of candidates for this stationary object as estimated by the sensor.
◆ color_description
| optional ColorDescription osi3::DetectedStationaryObject::color_description = 5 |
The dominating color of the material of the structure.
- osi_detectedobject.proto