osi3::DetectedStationaryObject Struct Reference
Classes
| struct | CandidateStationaryObject |
| A candidate for a detected stationary object as estimated by the sensor. More... | |
Public Attributes
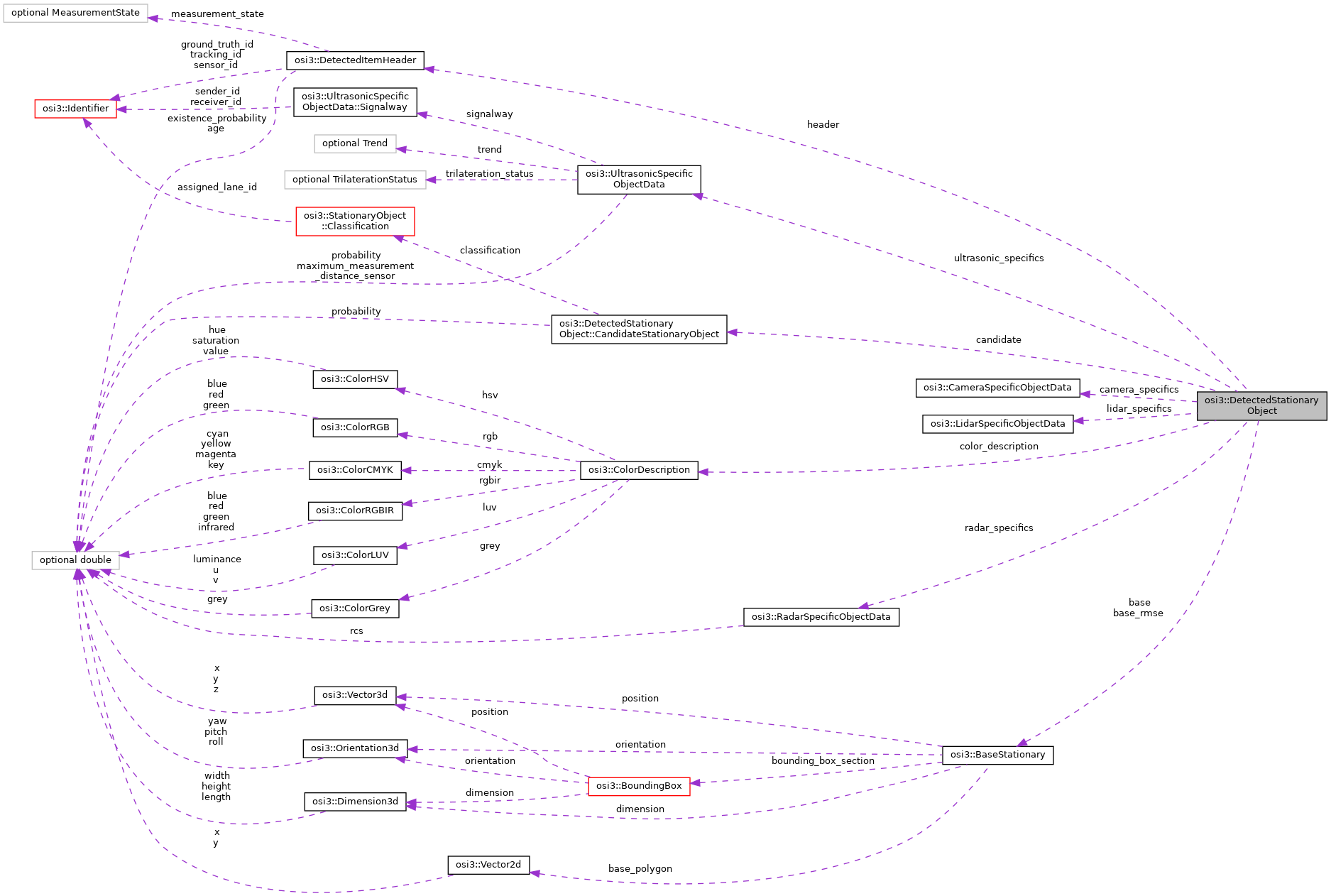
| optional DetectedItemHeader | header = 1 |
| Common information of one detected item. More... | |
| optional BaseStationary | base = 2 |
| The base parameters of the stationary object. More... | |
| optional BaseStationary | base_rmse = 3 |
| The root mean squared error of the base parameters of the detected stationary object (e.g. More... | |
| repeated CandidateStationaryObject | candidate = 4 |
| A list of candidates for this stationary object as estimated by the sensor. More... | |
| optional ColorDescription | color_description = 5 |
| The dominating color of the material of the structure. More... | |
| optional RadarSpecificObjectData | radar_specifics = 100 |
| Additional data that is specific to radar sensors. More... | |
| optional LidarSpecificObjectData | lidar_specifics = 101 |
| Additional data that is specific to lidar sensors. More... | |
| optional CameraSpecificObjectData | camera_specifics = 102 |
| Additional data that is specific to camera sensors. More... | |
| optional UltrasonicSpecificObjectData | ultrasonic_specifics = 103 |
| Additional data that is specific to ultrasonic sensors. More... | |
Detailed Description
A stationary object (e.g.
landmark) in the environment as detected by the sensor.
The parent frame of a detected stationary object is the virtual sensor coordinate system.
/note The virtual sensor coordinate system is relative to the vehicle coordinate system which has its origin in the center of the rear axle of the ego vehicle. This means if virtual sensor mounting position and orientation are set to (0,0,0) the virtual sensor coordinate system coincides with the vehicle coordinate system.
Member Data Documentation
◆ header
| optional DetectedItemHeader osi3::DetectedStationaryObject::header = 1 |
Common information of one detected item.
◆ base
| optional BaseStationary osi3::DetectedStationaryObject::base = 2 |
The base parameters of the stationary object.
◆ base_rmse
| optional BaseStationary osi3::DetectedStationaryObject::base_rmse = 3 |
The root mean squared error of the base parameters of the detected stationary object (e.g.
landmark). StationaryObject::base has to be identical for all candidate stationary objects.
◆ candidate
| repeated CandidateStationaryObject osi3::DetectedStationaryObject::candidate = 4 |
A list of candidates for this stationary object as estimated by the sensor.
◆ color_description
| optional ColorDescription osi3::DetectedStationaryObject::color_description = 5 |
The dominating color of the material of the structure.
◆ radar_specifics
| optional RadarSpecificObjectData osi3::DetectedStationaryObject::radar_specifics = 100 |
Additional data that is specific to radar sensors.
- Note
- Field needs not to be set if simulated sensor is not a radar sensor.
◆ lidar_specifics
| optional LidarSpecificObjectData osi3::DetectedStationaryObject::lidar_specifics = 101 |
Additional data that is specific to lidar sensors.
- Note
- Field needs not to be set if simulated sensor is not a lidar sensor.
◆ camera_specifics
| optional CameraSpecificObjectData osi3::DetectedStationaryObject::camera_specifics = 102 |
Additional data that is specific to camera sensors.
- Note
- Field needs not to be set if simulated sensor is not a camera sensor.
◆ ultrasonic_specifics
| optional UltrasonicSpecificObjectData osi3::DetectedStationaryObject::ultrasonic_specifics = 103 |
Additional data that is specific to ultrasonic sensors.
- Note
- Field needs not to be set if simulated sensor is not an ultrasonic sensor.
- osi_detectedobject.proto