osi3::MovingObject::VehicleAttributes::WheelData Struct Reference
Public Attributes
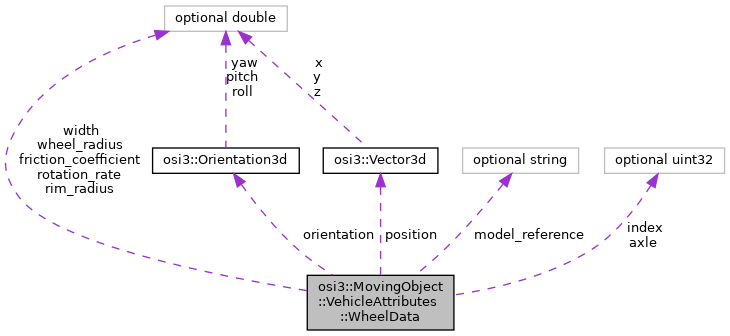
| optional uint32 | axle = 1 |
| The axle which contains this wheel. More... | |
| optional uint32 | index = 2 |
| The index of the wheel on the axle, counting in the direction of positive-y, that is, right-to-left. More... | |
| optional Vector3d | position = 3 |
| A vector pointing from the vehicle's reference system (center of bounding box) to the geometric center of the wheel. More... | |
| optional double | wheel_radius = 4 |
| Median radius of the wheel measured from the center of the wheel to the outer part of the tire. More... | |
| optional double | rim_radius = 5 |
| Median radius of the rim measured from the center to the outer, visible part of the rim. More... | |
| optional double | width = 6 |
| Median width of the tire. More... | |
| optional Orientation3d | orientation = 7 |
| Orientation of the wheel. More... | |
| optional double | rotation_rate = 8 |
| Rotation rate of the wheel. More... | |
| optional string | model_reference = 9 |
| Opaque reference of an associated 3D model of the wheel. More... | |
| optional double | friction_coefficient = 10 |
| The value describes the kinetic friction of the tire's contact point. More... | |
Detailed Description
Detailed wheel data.
The focus is on the description of a wheel regarding the perceivable information from the outside. It is not intended to be used for dynamic calculations, for example.
Member Data Documentation
◆ axle
| optional uint32 osi3::MovingObject::VehicleAttributes::WheelData::axle = 1 |
The axle which contains this wheel.
A value of 0 represents the front-most axle of the vehicle with higher numbers incrementing towards the rear-most axle.
◆ index
| optional uint32 osi3::MovingObject::VehicleAttributes::WheelData::index = 2 |
The index of the wheel on the axle, counting in the direction of positive-y, that is, right-to-left.
For example, on a standard 2-axle, 4-wheel car, the rear-right wheel would be (axle=1, index=0). This concept works also for twin tires.
◆ position
| optional Vector3d osi3::MovingObject::VehicleAttributes::WheelData::position = 3 |
A vector pointing from the vehicle's reference system (center of bounding box) to the geometric center of the wheel.
◆ wheel_radius
| optional double osi3::MovingObject::VehicleAttributes::WheelData::wheel_radius = 4 |
Median radius of the wheel measured from the center of the wheel to the outer part of the tire.
Unit: m
◆ rim_radius
| optional double osi3::MovingObject::VehicleAttributes::WheelData::rim_radius = 5 |
Median radius of the rim measured from the center to the outer, visible part of the rim.
Unit: m
◆ width
| optional double osi3::MovingObject::VehicleAttributes::WheelData::width = 6 |
Median width of the tire.
Unit: m
◆ orientation
| optional Orientation3d osi3::MovingObject::VehicleAttributes::WheelData::orientation = 7 |
Orientation of the wheel.
The reference system is the vehicle frame (center of bounding box).
◆ rotation_rate
| optional double osi3::MovingObject::VehicleAttributes::WheelData::rotation_rate = 8 |
Rotation rate of the wheel.
The rotation rate around the y-axis with respect to the wheel's coordinate system.
Unit: rad/s.
The sign convention is defined using the right-hand rule. It is applied on the y-axis of the vehicle's reference system (center of bounding box). Counterclockwise is positive and clockwise is negative.
- Note
- The vehicle's reference coordinate system is only used to determine the sign convention of the rotation rate.
◆ model_reference
| optional string osi3::MovingObject::VehicleAttributes::WheelData::model_reference = 9 |
Opaque reference of an associated 3D model of the wheel.
- Note
- It is implementation-specific how model_references are resolved to 3d models.
◆ friction_coefficient
| optional double osi3::MovingObject::VehicleAttributes::WheelData::friction_coefficient = 10 |
The value describes the kinetic friction of the tire's contact point.
If different friction coefficients due to more than one contact points are available, this value contains the average.
Unit: Dimensionless
- References:
- [1] Britannica, T. Editors of Encyclopaedia. (2020, June 24). coefficient of friction. Retrieved May 18, 2022, from https://www.britannica.com/science/coefficient-of-friction
- osi_object.proto