osi3::LogicalDetectionData Struct Reference
Public Attributes
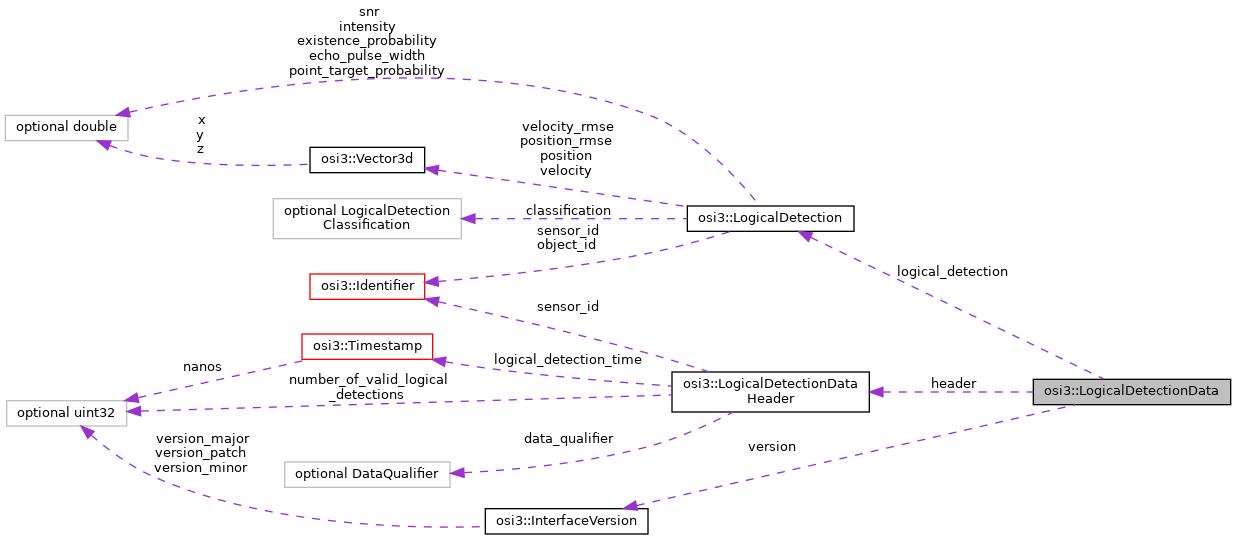
| optional InterfaceVersion | version = 1 |
| The interface version used by the sender (i.e. More... | |
| optional LogicalDetectionDataHeader | header = 2 |
| Header attributes of fused detections from multiple sensors and sensor types. More... | |
| repeated LogicalDetection | logical_detection = 3 |
| Logical detections consisting of transformed (and potentially fused) detections from one or multiple sensors and sensor types. More... | |
Detailed Description
Processed data from one or multiple sensors as a list of logical detections.
Logical detections are derived from sensor detections in a logical model through processing steps like fusion filtering, tracking etc.
All information is given with respect to the reference frame of the logical/virtual sensor SensorView::mounting_position (e.g. center of rear axle of the ego car) in Cartesian coordinates.
Member Data Documentation
◆ version
| optional InterfaceVersion osi3::LogicalDetectionData::version = 1 |
The interface version used by the sender (i.e.
the simulation environment).
- Rules
- is_set
◆ header
| optional LogicalDetectionDataHeader osi3::LogicalDetectionData::header = 2 |
Header attributes of fused detections from multiple sensors and sensor types.
◆ logical_detection
| repeated LogicalDetection osi3::LogicalDetectionData::logical_detection = 3 |
Logical detections consisting of transformed (and potentially fused) detections from one or multiple sensors and sensor types.
The parent frame of a logical detection is the virtual sensor coordinate system specified by SensorView::mounting_position .
/note The virtual sensor coordinate system is relative to the vehicle coordinate system which has its origin in the center of the rear axle of the ego vehicle. This means if virtual sensor mounting position and orientation are set to (0,0,0) the virtual sensor coordinate system coincides with the vehicle coordinate system.
- osi_logicaldetectiondata.proto