osi3::UltrasonicSpecificObjectData Struct Reference
Public Types
| enum | TrilaterationStatus { TRILATERATION_STATUS_UNKNOWN = 0, TRILATERATION_STATUS_OTHER = 1, TRILATERATION_STATUS_NOT_TRILATERATED = 2, TRILATERATION_STATUS_TRILATERATED = 3 } |
| This indicates if the object was calculated based on one or multiple sensors. More... | |
| enum | Trend { TREND_UNKNOWN = 0, TREND_OTHER = 1, TREND_CONSTANT_APPROACHING = 2, TREND_CONSTANT = 3, TREND_APPROACHING = 4, TREND_DEPARTING = 5 } |
| Describes the general moving direction of the detection. More... | |
Public Attributes
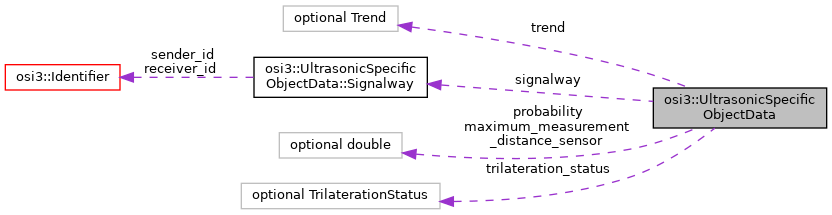
| optional double | maximum_measurement_distance_sensor = 1 |
| Maximum measured distance from one sensor which leads to the calculation of this object. More... | |
| optional double | probability = 2 |
| This value indicates the probability height for the classification in the calculated object. More... | |
| optional TrilaterationStatus | trilateration_status = 3 |
| This indicates if the detection was calculated based on one or multiple sensors. More... | |
| optional Trend | trend = 4 |
| Describes the general moving direction of the detection. More... | |
| repeated Signalway | signalway = 5 |
| Ultrasonic signalway. More... | |
Detailed Description
Message encapsulates all data for detected objects that is specific to ultrasonic sensors.
Member Enumeration Documentation
◆ TrilaterationStatus
This indicates if the object was calculated based on one or multiple sensors.
◆ Trend
Describes the general moving direction of the detection.
Member Data Documentation
◆ maximum_measurement_distance_sensor
| optional double osi3::UltrasonicSpecificObjectData::maximum_measurement_distance_sensor = 1 |
Maximum measured distance from one sensor which leads to the calculation of this object.
Unit: m
- Rules
- is_greater_than_or_equal_to: 0
◆ probability
| optional double osi3::UltrasonicSpecificObjectData::probability = 2 |
This value indicates the probability height for the classification in the calculated object.
Unit: %
- Rules
- is_less_than_or_equal_to: 1is_greater_than_or_equal_to: 0
◆ trilateration_status
| optional TrilaterationStatus osi3::UltrasonicSpecificObjectData::trilateration_status = 3 |
This indicates if the detection was calculated based on one or multiple sensors.
◆ trend
| optional Trend osi3::UltrasonicSpecificObjectData::trend = 4 |
Describes the general moving direction of the detection.
◆ signalway
| repeated Signalway osi3::UltrasonicSpecificObjectData::signalway = 5 |
Ultrasonic signalway.
Sender to receiver.
- Note
- This information can also be derived from the corresponding
UltrasonicDetection.UltrasonicDetectionrefer to DetectedXXX byUltrasonicDetection::object_id.
- osi_sensorspecific.proto