osi3::MotionRequest Struct Reference
Classes
| struct | DesiredState |
| The desired state is calculated by the function as a result of the motion planning stack. More... | |
| struct | DesiredTrajectory |
| Defined trajectory desired by the function. More... | |
Public Types
| enum | MotionRequestType { MOTION_REQUEST_TYPE_DESIRED_STATE = 0, MOTION_REQUEST_TYPE_TRAJECTORY = 1 } |
| Define different options for function output. More... | |
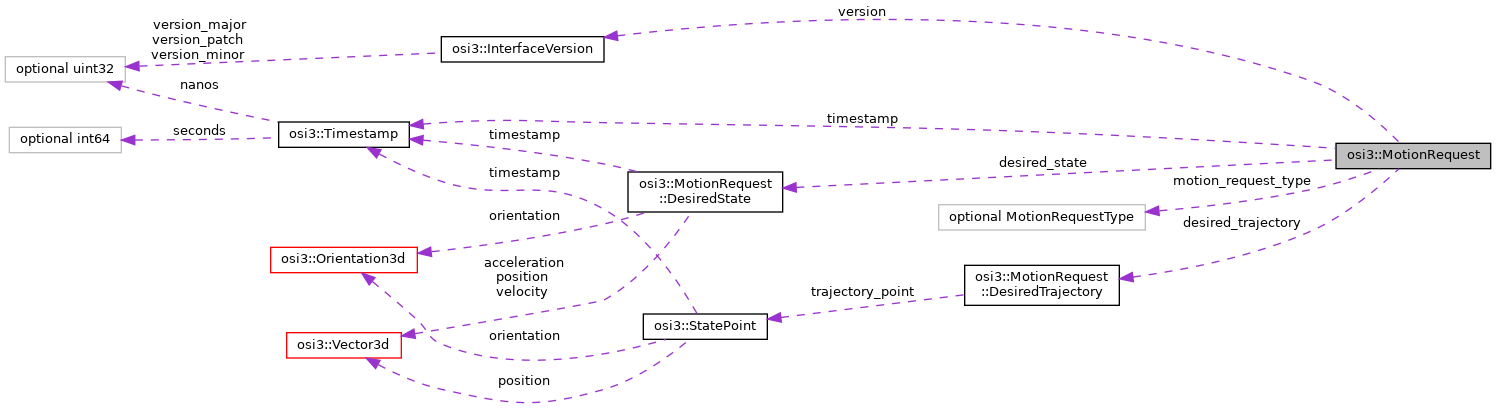
Public Attributes
| optional InterfaceVersion | version = 1 |
| The interface version used by the sender (simulation environment). More... | |
| optional Timestamp | timestamp = 2 |
| The data timestamp of the simulation environment. More... | |
| optional MotionRequestType | motion_request_type = 3 |
| Define the type that is used to specify the motion request. More... | |
| optional DesiredState | desired_state = 4 |
| Defines a desired state. More... | |
| optional DesiredTrajectory | desired_trajectory = 5 |
| Defines a desired trajectory. More... | |
Detailed Description
This message is intended as an interface between a motion-planning function and the actuator management.
The motion-planning function can thereby be a representation of a highly-automated driving function, a human driving behavior model, etc.
The motion-planning function can either send a desired future trajectory or a desired future state. The message can be defined by an additional variable.
- Note
- The coordinate system is defined as right-handed. All coordinates and orientations are relative to the global coordinate system. The reference point of the vehicle is the middle of the rear axis. Units are m for positions, m/s for velocities, and m/s^2 for accelerations.
Member Enumeration Documentation
Member Data Documentation
◆ version
| optional InterfaceVersion osi3::MotionRequest::version = 1 |
The interface version used by the sender (simulation environment).
◆ timestamp
| optional Timestamp osi3::MotionRequest::timestamp = 2 |
The data timestamp of the simulation environment.
A reference to Timestamp message.
◆ motion_request_type
| optional MotionRequestType osi3::MotionRequest::motion_request_type = 3 |
Define the type that is used to specify the motion request.
This must be set. Additionally, the field corresponding to the specified option must be set.
◆ desired_state
| optional DesiredState osi3::MotionRequest::desired_state = 4 |
Defines a desired state.
If the output option is set to DESIRED_STATE, this field must be set.
◆ desired_trajectory
| optional DesiredTrajectory osi3::MotionRequest::desired_trajectory = 5 |
Defines a desired trajectory.
If the output option is set to DESIRED_TRAJECTORY, this field must be set.
- osi_motionrequest.proto