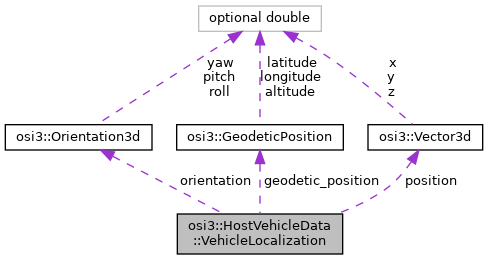
osi3::HostVehicleData::VehicleLocalization Struct Reference
Public Attributes
| optional Vector3d | position = 1 |
| Most accurate position information of the vehicle available in the on-board network measured in context to the global coordinate system. More... | |
| optional Orientation3d | orientation = 2 |
| Most accurate orientation information of the vehicle available in the on-board network measured in context to the global coordinate system. More... | |
| optional GeodeticPosition | geodetic_position = 3 |
| Most accurate geodetic information of the vehicle available in the on-board network. More... | |
Detailed Description
Current calculated and estimated location that can be based on GNSS and related navigation sensors.
This message does not contain the individual sensor values of the sensor technology.
This message contains the most accurate information the vehicle knows about its position available in the on-board network. Because of this the values can differ from the "true" values calculated out of GroundTruth::proj_string, GroundTruth::MovingObject::BaseMoving::position, GroundTruth::host_vehicle_id.
This data uses the reference point coincident with the center (x,y,z) of the bounding box.
Member Data Documentation
◆ position
| optional Vector3d osi3::HostVehicleData::VehicleLocalization::position = 1 |
Most accurate position information of the vehicle available in the on-board network measured in context to the global coordinate system.
◆ orientation
| optional Orientation3d osi3::HostVehicleData::VehicleLocalization::orientation = 2 |
Most accurate orientation information of the vehicle available in the on-board network measured in context to the global coordinate system.
◆ geodetic_position
| optional GeodeticPosition osi3::HostVehicleData::VehicleLocalization::geodetic_position = 3 |
Most accurate geodetic information of the vehicle available in the on-board network.
- osi_hostvehicledata.proto