osi3::HostVehicleData Struct Reference
Classes
| struct | VehicleAutomatedDrivingFunction |
| State of one automated driving function on the host vehicle. More... | |
| struct | VehicleBasics |
| Base parameters and overall states of the vehicle. More... | |
| struct | VehicleBrakeSystem |
| The focus here is on the description of the brake system. More... | |
| struct | VehicleLocalization |
| Current calculated and estimated location that can be based on GNSS and related navigation sensors. More... | |
| struct | VehicleMotion |
| Current calculated and estimated motion related information. More... | |
| struct | VehiclePowertrain |
| State description of the powertrain. More... | |
| struct | VehicleSteering |
| The focus here is on the description of the steering train. More... | |
| struct | VehicleWheels |
| The focus here is on the description of internal wheel states. More... | |
Public Attributes
| optional InterfaceVersion | version = 9 |
| The interface version used by the sender. More... | |
| optional Timestamp | timestamp = 10 |
| The timestamp of the host vehicle data. More... | |
| optional Identifier | host_vehicle_id = 11 |
| The ID of the host vehicle in any associated GroundTruth data. More... | |
| optional BaseMoving | location = 1 |
| Deprecated: Will be removed in next major release. More... | |
| optional BaseMoving | location_rmse = 2 |
| Deprecated: Will be removed in next major release. More... | |
| optional VehicleBasics | vehicle_basics = 3 |
| The basic parameters and overall states of the vehicle. More... | |
| optional VehiclePowertrain | vehicle_powertrain = 4 |
| Interface regarding the powertrain. More... | |
| optional VehicleBrakeSystem | vehicle_brake_system = 5 |
| Interface regarding the brake system. More... | |
| optional VehicleSteering | vehicle_steering = 6 |
| Interface regarding the steering. More... | |
| optional VehicleWheels | vehicle_wheels = 7 |
| Interface regarding the internal wheel states. More... | |
| optional VehicleLocalization | vehicle_localization = 8 |
| Interface regarding the localization. More... | |
| repeated VehicleAutomatedDrivingFunction | vehicle_automated_driving_function = 12 |
| State of any automated driving functions. More... | |
| optional VehicleMotion | vehicle_motion = 13 |
| Interface regarding the vehicle motion. More... | |
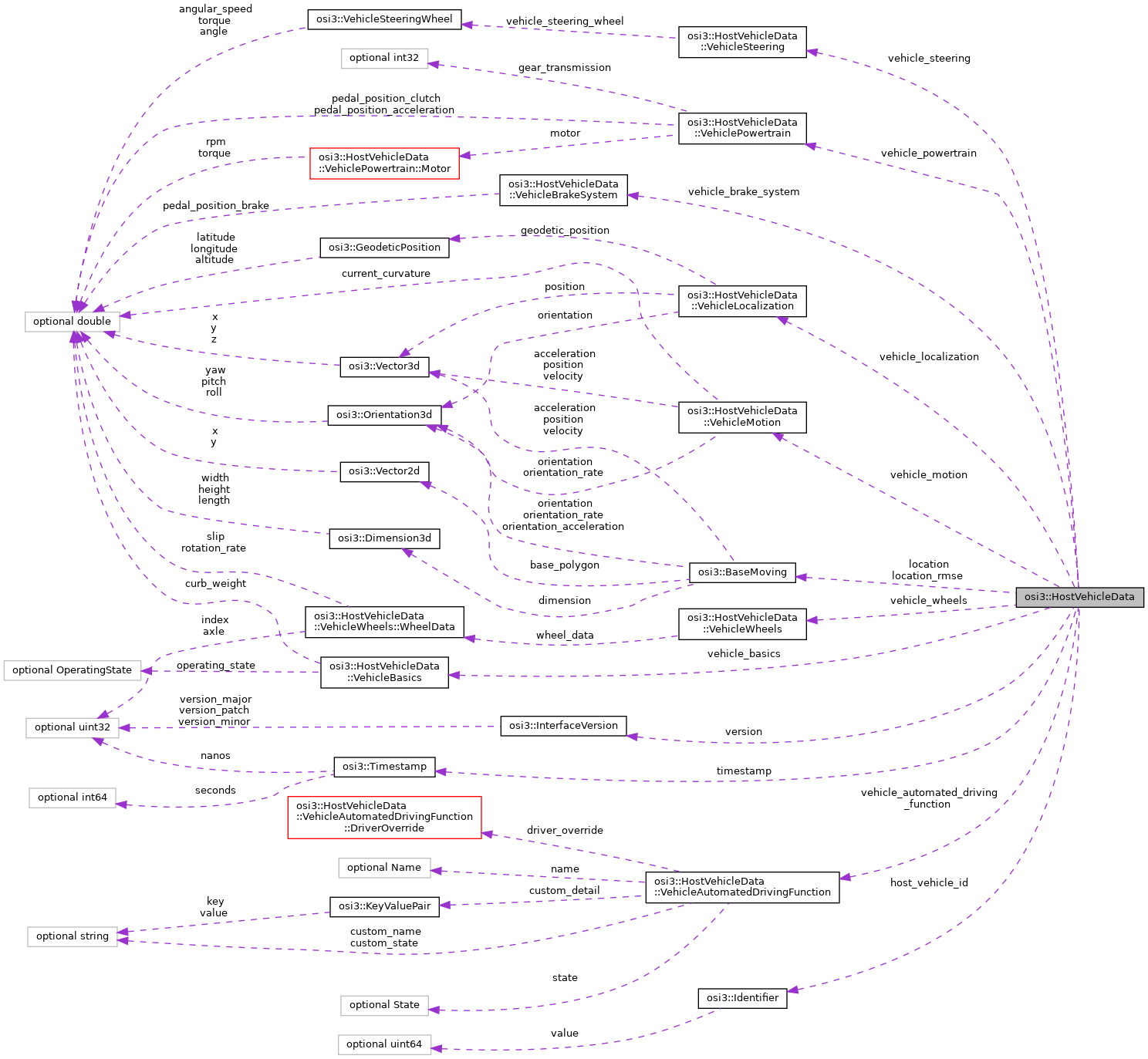
Detailed Description
Host vehicle data is about the perception of the vehicle about its own internal states.
It captures the knowledge the vehicle has internally, which can differ from the actual or global truth for various reasons. This message can also be understood as an interface container for the signals of a rest bus simulation.
It consists of different messages categorizing the vehicle in: Basics, powertrain, brake system, steering, wheels and localization.
Member Data Documentation
◆ version
| optional InterfaceVersion osi3::HostVehicleData::version = 9 |
The interface version used by the sender.
◆ timestamp
| optional Timestamp osi3::HostVehicleData::timestamp = 10 |
The timestamp of the host vehicle data.
Zero time is arbitrary but must be identical for all messages. Zero time does not need to coincide with the unix epoch. Recommended is the starting time point of the simulation or measurement.
- Note
- This is the point in time that the host vehicle data message becomes available as snapshot from the board net information.
◆ host_vehicle_id
| optional Identifier osi3::HostVehicleData::host_vehicle_id = 11 |
The ID of the host vehicle in any associated GroundTruth data.
◆ location
| optional BaseMoving osi3::HostVehicleData::location = 1 |
Deprecated: Will be removed in next major release.
Moved to vehicle_localization. Current estimated location based on GPS- and related navigation sensors.
- Note
- Note that dimension and base_polygon need not be set.
◆ location_rmse
| optional BaseMoving osi3::HostVehicleData::location_rmse = 2 |
Deprecated: Will be removed in next major release.
Moved to vehicle_localization. Current estimated location error based on GPS and related navigation sensors.
- Note
- Note that dimension and base_polygon need not be set.
◆ vehicle_basics
| optional VehicleBasics osi3::HostVehicleData::vehicle_basics = 3 |
The basic parameters and overall states of the vehicle.
◆ vehicle_powertrain
| optional VehiclePowertrain osi3::HostVehicleData::vehicle_powertrain = 4 |
Interface regarding the powertrain.
◆ vehicle_brake_system
| optional VehicleBrakeSystem osi3::HostVehicleData::vehicle_brake_system = 5 |
Interface regarding the brake system.
◆ vehicle_steering
| optional VehicleSteering osi3::HostVehicleData::vehicle_steering = 6 |
Interface regarding the steering.
◆ vehicle_wheels
| optional VehicleWheels osi3::HostVehicleData::vehicle_wheels = 7 |
Interface regarding the internal wheel states.
◆ vehicle_localization
| optional VehicleLocalization osi3::HostVehicleData::vehicle_localization = 8 |
Interface regarding the localization.
◆ vehicle_automated_driving_function
| repeated VehicleAutomatedDrivingFunction osi3::HostVehicleData::vehicle_automated_driving_function = 12 |
State of any automated driving functions.
This can include:
- information presented to the driver, for example, parking sensors
- warnings raised by the vehicle, for example, forward collision warning
- corrective action taken by the vehicle, for example, auto emergency braking
- full level 4 self driving systems
- Note
- OSI uses singular instead of plural for repeated field names.
◆ vehicle_motion
| optional VehicleMotion osi3::HostVehicleData::vehicle_motion = 13 |
Interface regarding the vehicle motion.
- osi_hostvehicledata.proto