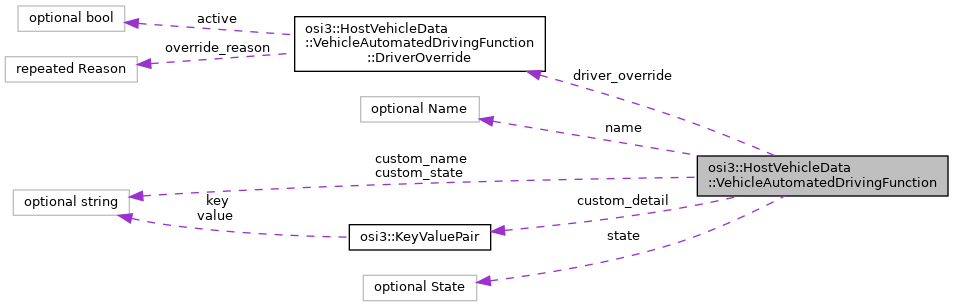
osi3::HostVehicleData::VehicleAutomatedDrivingFunction Struct Reference
Classes
| struct | DriverOverride |
| Driver override information. More... | |
Public Types
Public Attributes
| optional Name | name = 1 |
| The particular driving function being reported about. More... | |
| optional string | custom_name = 2 |
| Custom driving function name. More... | |
| optional State | state = 3 |
| The state of the function. More... | |
| optional string | custom_state = 4 |
| Custom state. More... | |
| optional DriverOverride | driver_override = 5 |
| Whether, and how, the driver has overridden this function. More... | |
| repeated KeyValuePair | custom_detail = 6 |
| Custom detail. More... | |
Member Enumeration Documentation
◆ Name
A list of possible automated driving features.
- Note
- This can span (in theory) from Level 0 all the way to Level 5.
- References:
- [1] CLEARING THE CONFUSION: Recommended Common Naming for Advanced Driver Assistance Technologies, SAE International, Retrieved October 22, 2021, from https://www.sae.org/binaries/content/assets/cm/content/miscellaneous/adas-nomenclature.pdf [2] Automated Driving, German Association of the Automotive Industry (VDA), Retrieved October 22, 2021, from https://www.vda.de/en/topics/innovation-and-technology/automated-driving/automated-driving
| Enumerator | |
|---|---|
| NAME_UNKNOWN | Unknown feature, should not be used. |
| NAME_OTHER | Custom feature, see custom_name. |
| NAME_BLIND_SPOT_WARNING | Blind spot warning. |
| NAME_FORWARD_COLLISION_WARNING | Forward collision warning. |
| NAME_LANE_DEPARTURE_WARNING | Lane departure warning. |
| NAME_PARKING_COLLISION_WARNING | Parking collision warning. |
| NAME_REAR_CROSS_TRAFFIC_WARNING | Rear cross-traffic warning. |
| NAME_AUTOMATIC_EMERGENCY_BRAKING | Automatic emergency braking. |
| NAME_AUTOMATIC_EMERGENCY_STEERING | Emergency steering. |
| NAME_REVERSE_AUTOMATIC_EMERGENCY_BRAKING | Reverse automatic emergency braking. |
| NAME_ADAPTIVE_CRUISE_CONTROL | Adaptive cruise control. |
| NAME_LANE_KEEPING_ASSIST | Lane keeping assist. |
| NAME_ACTIVE_DRIVING_ASSISTANCE | Active driving assistance. |
| NAME_BACKUP_CAMERA | Backup camera. |
| NAME_SURROUND_VIEW_CAMERA | Surround view camera. |
| NAME_ACTIVE_PARKING_ASSISTANCE | Active parking assistance. |
| NAME_REMOTE_PARKING_ASSISTANCE | Remote parking assistance. |
| NAME_TRAILER_ASSISTANCE | Trailer assistance. |
| NAME_AUTOMATIC_HIGH_BEAMS | Automatic high beams. |
| NAME_DRIVER_MONITORING | Driver monitoring. |
| NAME_HEAD_UP_DISPLAY | Head up display. |
| NAME_NIGHT_VISION | Night vision. |
| NAME_URBAN_DRIVING | Urban driving. |
| NAME_HIGHWAY_AUTOPILOT | Highway autopilot. |
| NAME_CRUISE_CONTROL | Cruise control. |
| NAME_SPEED_LIMIT_CONTROL | Speed limit control. |
◆ State
The state that the feature is in.
- Note
- Not all of these will be applicable for all vehicles and features.
Member Data Documentation
◆ name
| optional Name osi3::HostVehicleData::VehicleAutomatedDrivingFunction::name = 1 |
The particular driving function being reported about.
◆ custom_name
| optional string osi3::HostVehicleData::VehicleAutomatedDrivingFunction::custom_name = 2 |
Custom driving function name.
Only used if name is set to NAME_OTHER.
◆ state
| optional State osi3::HostVehicleData::VehicleAutomatedDrivingFunction::state = 3 |
The state of the function.
This is whether the function has actually been triggered, for example, a warning has been raised, or additional braking is in effect.
◆ custom_state
| optional string osi3::HostVehicleData::VehicleAutomatedDrivingFunction::custom_state = 4 |
Custom state.
Only used if the state is set to STATE_OTHER.
◆ driver_override
| optional DriverOverride osi3::HostVehicleData::VehicleAutomatedDrivingFunction::driver_override = 5 |
Whether, and how, the driver has overridden this function.
◆ custom_detail
| repeated KeyValuePair osi3::HostVehicleData::VehicleAutomatedDrivingFunction::custom_detail = 6 |
Custom detail.
An opaque set of key-value pairs which capture any user specific details that may be relevant. This could include details about how a warning was raised (dashboard, audible, etc.) or it could be about settings which would influence evaluation, such as sensitivity settings.
- osi_hostvehicledata.proto