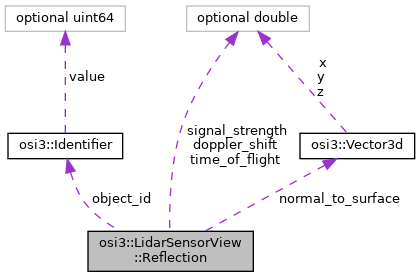
osi3::LidarSensorView::Reflection Struct Reference
Public Attributes
| optional double | signal_strength = 1 |
| Relative signal level of the reflection. More... | |
| optional double | time_of_flight = 2 |
| Time of flight. More... | |
| optional double | doppler_shift = 3 |
| Doppler shift. More... | |
| optional Vector3d | normal_to_surface = 5 |
| normal to surface angle. More... | |
| optional Identifier | object_id = 6 |
| ID of the detected object this reflection is associated to. More... | |
Member Data Documentation
◆ signal_strength
| optional double osi3::LidarSensorView::Reflection::signal_strength = 1 |
Relative signal level of the reflection.
This takes the signal losses due to scattering and absorption into account, and will, when multiplied by TX power yield the potential RX power (disregarding any other RX/TX losses).
Unit: dB
◆ time_of_flight
| optional double osi3::LidarSensorView::Reflection::time_of_flight = 2 |
Time of flight.
This is the time of flight of the reflection, which is directly proportional to the distance traveled.
Unit: s
◆ doppler_shift
| optional double osi3::LidarSensorView::Reflection::doppler_shift = 3 |
Doppler shift.
Shift in frequency based on the specified TX frequency.
Unit: Hz
◆ normal_to_surface
| optional Vector3d osi3::LidarSensorView::Reflection::normal_to_surface = 5 |
normal to surface angle.
The normal of the transmitted beam to the object, road marking, etc. encounter.
- Note
- data is in Lidar coordinate system
Unit: unit vector
◆ object_id
| optional Identifier osi3::LidarSensorView::Reflection::object_id = 6 |
ID of the detected object this reflection is associated to.
can be used for ray tracing debug
- Note
- ID = MAX(uint64) indicates no reference to an object.
- osi_sensorview.proto