The header attributes of each sensor's detection list. More...
Public Attributes | |
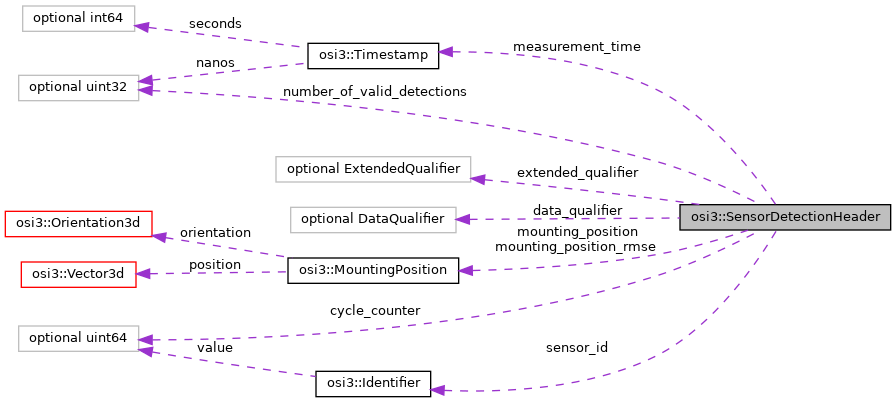
| optional Timestamp | measurement_time = 1 |
| Time stamp at which the measurement was taken (not the time at which it was processed or at which it is transmitted) in the global synchronized time. More... | |
| optional uint64 | cycle_counter = 2 |
| Monotonous counter to identify the exact cycle. More... | |
| optional MountingPosition | mounting_position = 3 |
| The physical mounting position of the sensor (origin and orientation of the sensor frame). More... | |
| optional MountingPosition | mounting_position_rmse = 4 |
| The origin/orientation of the sensor frame represents the current mounting pose to the best knowledge of the sensor. More... | |
| optional DataQualifier | data_qualifier = 5 |
| Data Qualifier expresses to what extent the content of this event can be relied on. More... | |
| optional uint32 | number_of_valid_detections = 6 |
| The current number of valid detections in the detections list. More... | |
| optional Identifier | sensor_id = 7 |
The ID of the sensor at host vehicle's mounting_position. More... | |
| optional ExtendedQualifier | extended_qualifier = 8 |
The extended qualifier describes the reason (not the effect) why the event data qualifier, data_qualifier, is reduced or not available. More... | |
Detailed Description
The header attributes of each sensor's detection list.
Member Enumeration Documentation
◆ DataQualifier
Data qualifier communicates the overall availability of the interface.
◆ ExtendedQualifier
The extended qualifier describes the reason (not the effect) why the event data qualifier, data_qualifier, is reduced or not available.
Member Data Documentation
◆ measurement_time
| optional Timestamp osi3::SensorDetectionHeader::measurement_time = 1 |
Time stamp at which the measurement was taken (not the time at which it was processed or at which it is transmitted) in the global synchronized time.
- Note
- See
SensorData::timestampandSensorData::last_measurement_timefor detailed discussions on the semantics of time-related fields.
◆ cycle_counter
| optional uint64 osi3::SensorDetectionHeader::cycle_counter = 2 |
Monotonous counter to identify the exact cycle.
In general the detection function is called periodically and cycle_counter corresponds to the number of periods.
- Rules\n\code{.unparsed}
- is_greater_than_or_equal_to: 0
◆ mounting_position
| optional MountingPosition osi3::SensorDetectionHeader::mounting_position = 3 |
The physical mounting position of the sensor (origin and orientation of the sensor frame).
Both origin and orientation are given in and with respect to the host vehicle coordinate system [1].
The sensor frame's x-axis is pointing in the central viewing direction of the sensor. It is the angle bisector of the sensor's horizontal and vertical field of view. The terms horizontal and vertical must be understood as names for the two principal planes of the sensor's field of view (relative to the sensor frame's orientation), which do not have to be horizontal or vertical in the strict sense of being parallel or perpendicular to the local gravitational vector. The horizontal field of view defines the sensor frame's xy-plane and the vertical field of view defines the xz-plane. The sensor frame is right-handed and the z-axis is pointing in an upward direction.
The sensor frame uses cartesian coordinates. The sensor frame's origin is identical to sensor detection frame's origin. Detections are defined in the sensor detection frame which uses e.g. spherical coordinates.
- Reference:
- [1] DIN Deutsches Institut fuer Normung e. V. (2013). DIN ISO 8855 Strassenfahrzeuge - Fahrzeugdynamik und Fahrverhalten - Begriffe. (DIN ISO 8855:2013-11). Berlin, Germany.
- Rules\n\code{.unparsed}
- is_set
◆ mounting_position_rmse
| optional MountingPosition osi3::SensorDetectionHeader::mounting_position_rmse = 4 |
The origin/orientation of the sensor frame represents the current mounting pose to the best knowledge of the sensor.
The estimation of the 6D pose given by the calibration. The uncertainty of this estimation is given with the corresponding 6D root mean squared error. The estimation of the current origin does not include effects due to short-time dynamics, such as pitch angles from braking, but includes long-time calibration values, such as pitch angles from luggage in the trunk.
◆ data_qualifier
| optional DataQualifier osi3::SensorDetectionHeader::data_qualifier = 5 |
Data Qualifier expresses to what extent the content of this event can be relied on.
◆ number_of_valid_detections
| optional uint32 osi3::SensorDetectionHeader::number_of_valid_detections = 6 |
The current number of valid detections in the detections list.
- Note
- This value has to be set if the list contains invalid detections.
- Rules\n\code{.unparsed}
- is_greater_than_or_equal_to: 0
◆ sensor_id
| optional Identifier osi3::SensorDetectionHeader::sensor_id = 7 |
The ID of the sensor at host vehicle's mounting_position.
This ID can equal SensorData::sensor_id, if SensorData holds only data from one sensor/sensor model.
- Rules\n\code{.unparsed}
- is_set
◆ extended_qualifier
| optional ExtendedQualifier osi3::SensorDetectionHeader::extended_qualifier = 8 |
The extended qualifier describes the reason (not the effect) why the event data qualifier, data_qualifier, is reduced or not available.
The documentation for this struct was generated from the following file:
- osi_featuredata.proto