osi3::Lane Struct Reference
A lane in the road network. More...
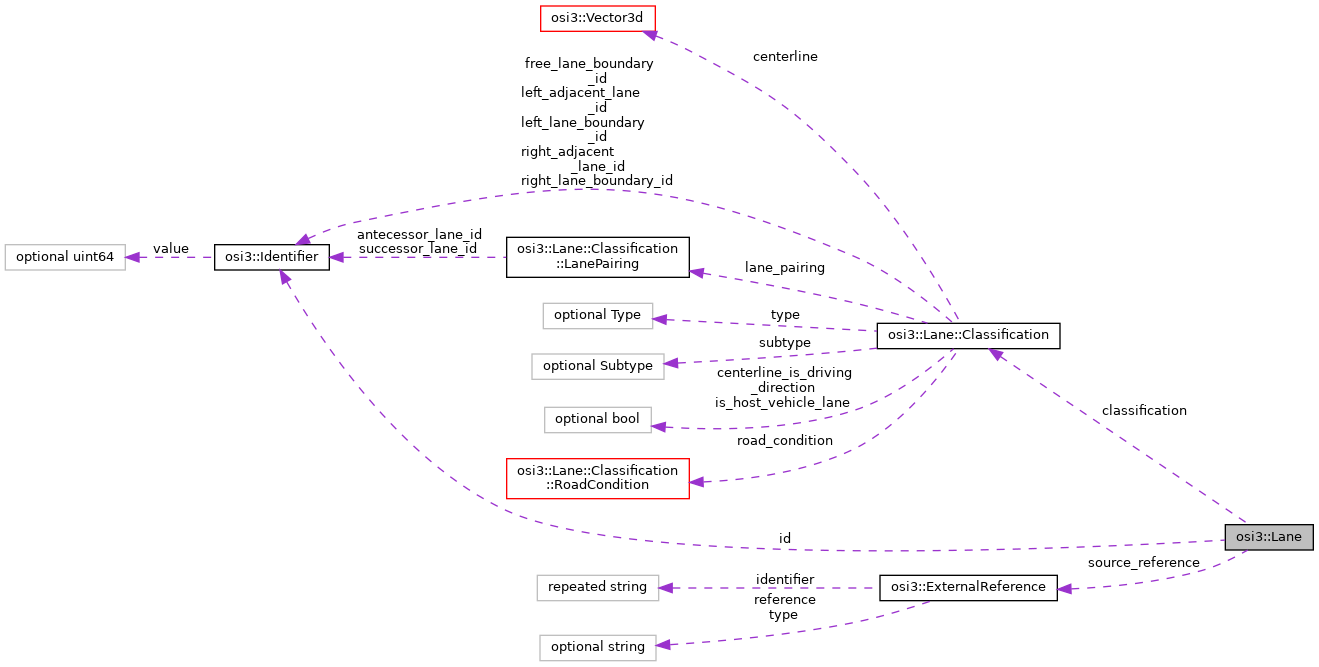
Collaboration diagram for osi3::Lane:
Classes | |
| struct | Classification |
Classification of a lane. More... | |
Public Attributes | |
| optional Identifier | id = 1 |
| The ID of the lane. More... | |
| optional Classification | classification = 2 |
| The classification of the lane. More... | |
| repeated ExternalReference | source_reference = 3 |
| Optional external reference to the lane source. More... | |
Detailed Description
A lane in the road network.
A lane is part of a road and mainly characterized by its center line. It also knows about any adjacent lanes, antecessor and successor lanes. The following images will be referred to by later comments. The lane l4 in image HighwayExit is used as reference if not mentioned otherwise.
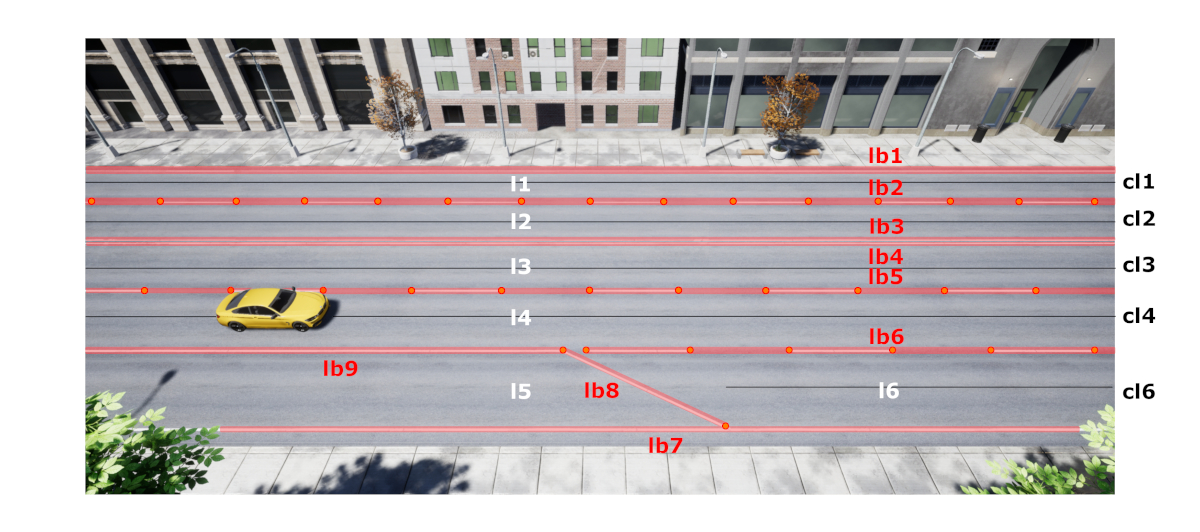
HighwayExit | 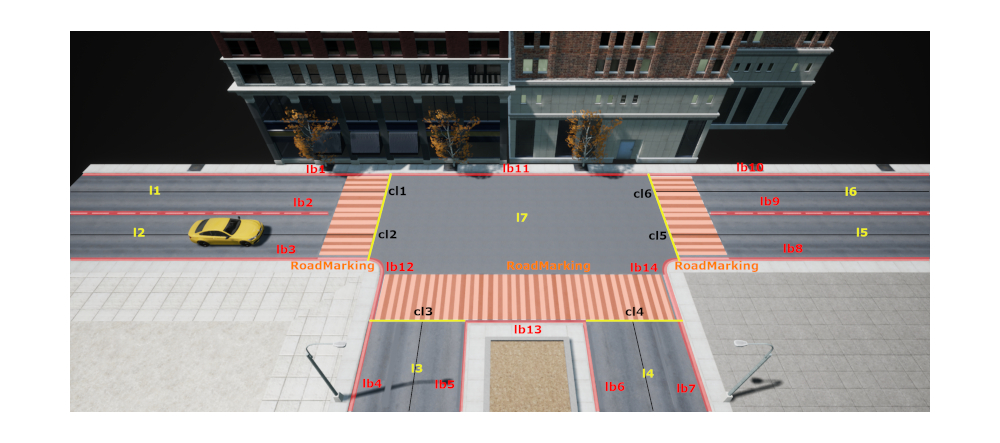
Intersection |
- Note
- In the examples, the symbols l1, l2, ... and lb1, lb2, ... stand for the lane ids and lane boundary ids respectively, i.e. for integers (uint64). The symbols cl1, cl2, ... represent the osi3::Lane::Classification::centerline elements of the lanes with the respective ids.
Member Data Documentation
◆ id
| optional Identifier osi3::Lane::id = 1 |
The ID of the lane.
Example: l4 (see reference picture HighwayExit).
- Note
- Note ID is global unique.
- Rules\n\code{.unparsed}
- is_globally_unique is_set
◆ classification
| optional Classification osi3::Lane::classification = 2 |
The classification of the lane.
◆ source_reference
| repeated ExternalReference osi3::Lane::source_reference = 3 |
Optional external reference to the lane source.
The external reference points to the source of the lane, if it is derived from one or more objects or external references.
For example, to reference a lane defined in an OpenDRIVE map the items should be set as follows:
- reference = URI to map, can remain empty if identical with definition in
GroundTruth::map_reference - type = "net.asam.opendrive"
- identifier[0] = id of t_road
- identifier[1] = s of t_road_lanes_laneSection
- identifier[2] = id of t_road_lanes_laneSection_left_lane, t_road_lanes_laneSection_right_lane
- Note
- For non-ASAM Standards, it is implementation-specific how source_reference is resolved.
- The value has to be repeated, because one lane segment may be derived from more than one origin segment. Multiple sources may be added as reference as well, for example, a map and sensors.
The documentation for this struct was generated from the following file:
- osi_lane.proto