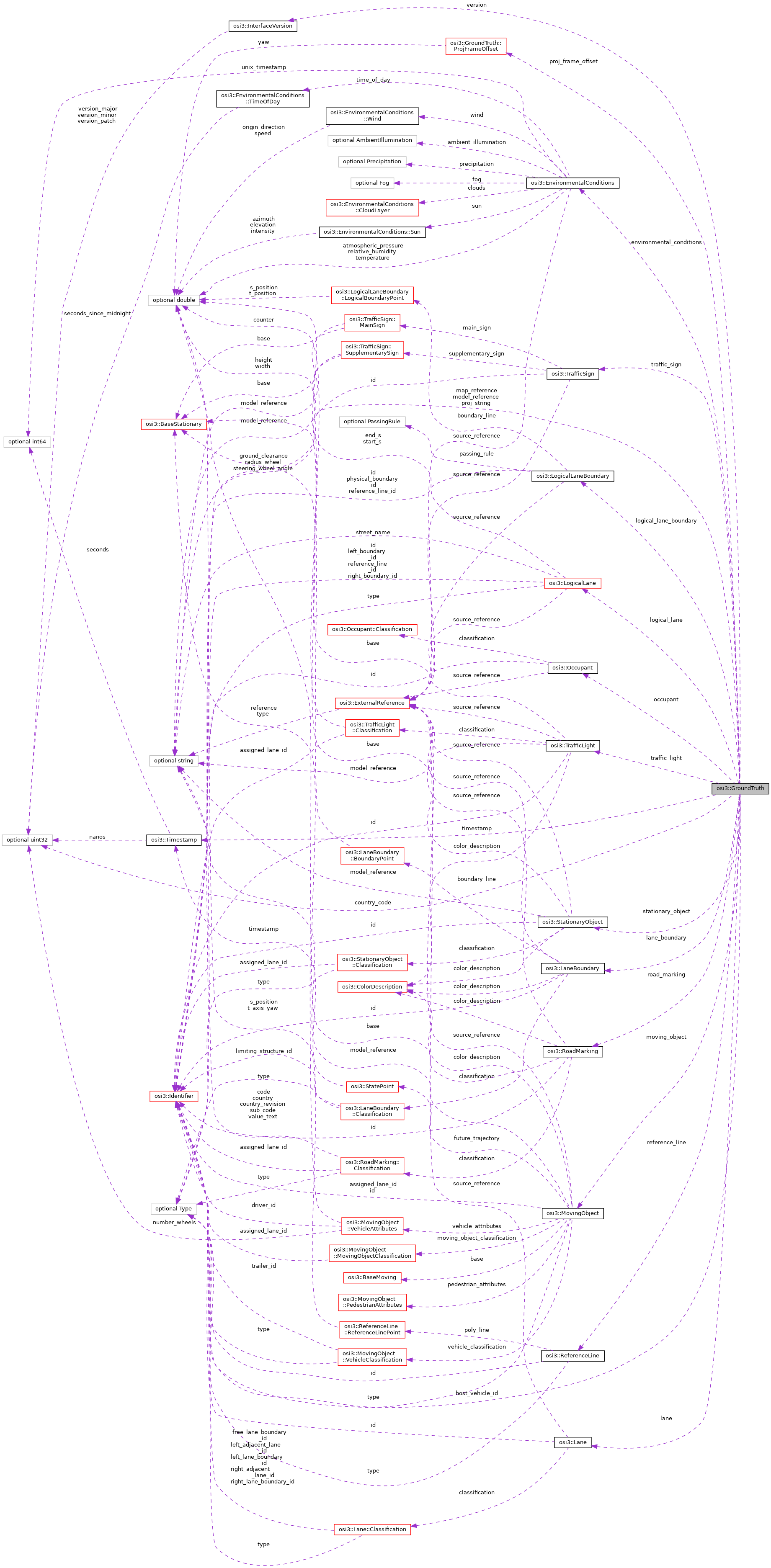
The ground truth information from the simulation environment. More...
Classes | |
| struct | ProjFrameOffset |
| Coordinate frame offset to transform from OSI's global coordinate system to a coordinate reference system to be used for given PROJ transformations. More... | |
Public Attributes | |
| optional InterfaceVersion | version = 1 |
| The interface version used by the sender (i.e. More... | |
| optional Timestamp | timestamp = 2 |
| The data timestamp of the simulation environment. More... | |
| optional Identifier | host_vehicle_id = 3 |
The ID of the host vehicle object referencing to MovingObject . More... | |
| repeated StationaryObject | stationary_object = 4 |
| The list of stationary objects (excluding traffic signs and traffic lights). More... | |
| repeated MovingObject | moving_object = 5 |
| The list of all other moving objects including all (host) vehicles. More... | |
| repeated TrafficSign | traffic_sign = 6 |
| The list of traffic signs. More... | |
| repeated TrafficLight | traffic_light = 7 |
| The list of traffic lights. More... | |
| repeated RoadMarking | road_marking = 8 |
The list of road surface markings (lane markings are excluded and defined as LaneBoundary). More... | |
| repeated LaneBoundary | lane_boundary = 9 |
| The list of lane boundaries. More... | |
| repeated Lane | lane = 10 |
| The list of lanes forming a road network. More... | |
| repeated Occupant | occupant = 11 |
| The list of passengers in the (host) vehicle(s). More... | |
| optional EnvironmentalConditions | environmental_conditions = 12 |
| Conditions of the environment. More... | |
| optional uint32 | country_code = 13 |
| The ISO country code in 3 digit numeric format according to: ISO Code 3166/1 [1]. More... | |
| optional string | proj_string = 14 |
Projection string that allows to transform all coordinates in GroundTruth into a different cartographic projection after the proj_frame_offset has been applied. More... | |
| optional string | map_reference = 15 |
| Opaque reference of a map. More... | |
| optional string | model_reference = 16 |
| Opaque reference of an associated 3D model. More... | |
| repeated ReferenceLine | reference_line = 17 |
| Reference lines used by LogicalLane. More... | |
| repeated LogicalLaneBoundary | logical_lane_boundary = 18 |
| Logical lane boundaries used by LogicalLane. More... | |
| repeated LogicalLane | logical_lane = 19 |
| Logical lanes used e.g. More... | |
| optional ProjFrameOffset | proj_frame_offset = 20 |
| Coordinate frame offset to be used for PROJ transformations. More... | |
Detailed Description
The ground truth information from the simulation environment.
This ground truth information is supposed to describe the whole simulated environment around any simulated vehicle. For each simulated host vehicle (there may be one or multiple), define an area around the vehicle which is greater than the combined field of views (FOV) of all obstructed sensors in the vehicle. The ground truth data is supposed to describe the convex hull of all such areas w.r.t. a global simulation coordinate system.
The simulation coordinate system may change during the simulation if and only if all coordinates w.r.t. this coordinate system are also changed.
The data has to be sent at a rate defined by the receiving partner. When sending, values with default values might be left default in order to improve performance.
To provide a complete interface, all fields of all contained messages must be properly set unless specifically stated in the field's definition that the field may remain unset.
In enums (e.g. types) the unknown (first / default) value is not allowed to be used in the ground truth interface.
Member Data Documentation
◆ version
| optional InterfaceVersion osi3::GroundTruth::version = 1 |
The interface version used by the sender (i.e.
the simulation environment).
- Rules\n\code{.unparsed}
- is_set
◆ timestamp
| optional Timestamp osi3::GroundTruth::timestamp = 2 |
The data timestamp of the simulation environment.
The zero time point is arbitrary but must be identical for all messages. Recommendation: Zero time point for start point of the simulation.
- Note
- Zero time point does not need to coincide with the UNIX epoch.
- For ground truth data this timestamp coincides both with the notional simulation time the data applies to and the time it was sent (there is no inherent latency for ground truth data, as opposed to sensor data).
- Rules\n\code{.unparsed}
- is_set
◆ host_vehicle_id
| optional Identifier osi3::GroundTruth::host_vehicle_id = 3 |
The ID of the host vehicle object referencing to MovingObject .
- Note
- This ID has to be filled and is not optional!
- Rules\n\code{.unparsed}
- refers_to: MovingObject is_set
◆ stationary_object
| repeated StationaryObject osi3::GroundTruth::stationary_object = 4 |
The list of stationary objects (excluding traffic signs and traffic lights).
◆ moving_object
| repeated MovingObject osi3::GroundTruth::moving_object = 5 |
The list of all other moving objects including all (host) vehicles.
◆ traffic_sign
| repeated TrafficSign osi3::GroundTruth::traffic_sign = 6 |
The list of traffic signs.
◆ traffic_light
| repeated TrafficLight osi3::GroundTruth::traffic_light = 7 |
The list of traffic lights.
◆ road_marking
| repeated RoadMarking osi3::GroundTruth::road_marking = 8 |
The list of road surface markings (lane markings are excluded and defined as LaneBoundary).
◆ lane_boundary
| repeated LaneBoundary osi3::GroundTruth::lane_boundary = 9 |
The list of lane boundaries.
◆ lane
| repeated Lane osi3::GroundTruth::lane = 10 |
The list of lanes forming a road network.
◆ occupant
| repeated Occupant osi3::GroundTruth::occupant = 11 |
The list of passengers in the (host) vehicle(s).
◆ environmental_conditions
| optional EnvironmentalConditions osi3::GroundTruth::environmental_conditions = 12 |
Conditions of the environment.
◆ country_code
| optional uint32 osi3::GroundTruth::country_code = 13 |
The ISO country code in 3 digit numeric format according to: ISO Code 3166/1 [1].
E.g. Germany = 276, USA = 840.
- Reference:
- [1] ISO International Organization for Standardization. (2013). ISO 3166-1 Codes for the representation of names of countries and their subdivisions - Part 1: Country codes. (ISO 3166-1:2013). Geneva, Switzerland.
- Rules\n\code{.unparsed}
- is_iso_country_code
◆ proj_string
| optional string osi3::GroundTruth::proj_string = 14 |
Projection string that allows to transform all coordinates in GroundTruth into a different cartographic projection after the proj_frame_offset has been applied.
The string follows the PROJ rules for projections [1].
- Reference:
- [1] PROJ contributors. (2019). PROJ coordinate transformation software library. Open Source Geospatial Foundation. Retrieved January 25, 2019, from https://proj.org/usage/projections.html
◆ map_reference
| optional string osi3::GroundTruth::map_reference = 15 |
Opaque reference of a map.
- Note
- Origin and orientation of the map have to coincide with the inertial coordinate frame of the ground truth.
- It is implementation-specific how map_reference is resolved.
◆ model_reference
| optional string osi3::GroundTruth::model_reference = 16 |
Opaque reference of an associated 3D model.
The model covers the static parts of the environment that are not provided as individual models referenced from ground truth objects like moving or stationary objects.
- Note
- Origin and orientation of the model have to coincide with the inertial coordinate frame of the ground truth.
- It is implementation-specific how model_references are resolved to 3d models. The parts the world model contains are also implementation-specific. For example, the world model can either contain street geometries or derives street geometries automatically from a map reference.
◆ reference_line
| repeated ReferenceLine osi3::GroundTruth::reference_line = 17 |
Reference lines used by LogicalLane.
◆ logical_lane_boundary
| repeated LogicalLaneBoundary osi3::GroundTruth::logical_lane_boundary = 18 |
Logical lane boundaries used by LogicalLane.
◆ logical_lane
| repeated LogicalLane osi3::GroundTruth::logical_lane = 19 |
Logical lanes used e.g.
by traffic agents
◆ proj_frame_offset
| optional ProjFrameOffset osi3::GroundTruth::proj_frame_offset = 20 |
Coordinate frame offset to be used for PROJ transformations.
The documentation for this struct was generated from the following file:
- osi_groundtruth.proto