Current calculated and estimated motion related information. More...
Public Attributes | |
| optional Vector3d | position = 1 |
| Most accurate position of the vehicle available in the on-board network measured in the cartesian global coordinate system. More... | |
| optional Orientation3d | orientation = 2 |
| Most accurate orientation information of the vehicle available in the on-board network measured on the vehicle coordinate system in context of the global inertial system. More... | |
| optional Vector3d | velocity = 3 |
| Most accurate velocity information of the vehicle, available in the on-board network measured on the vehicle coordinate system in context of the global inertial system. More... | |
| optional Orientation3d | orientation_rate = 4 |
| Most accurate orientation rate of the vehicle, available in the on-board network measured on the vehicle coordinate system in context of the global inertial system. More... | |
| optional Vector3d | acceleration = 5 |
| Most accurate acceleration information of the vehicle, available in the on-board network measured on the vehicle coordinate system in context of the global inertial system. More... | |
| optional double | current_curvature = 6 |
| Most accurate curvature currently followed by vehicle and available in the on-board network. More... | |
Detailed Description
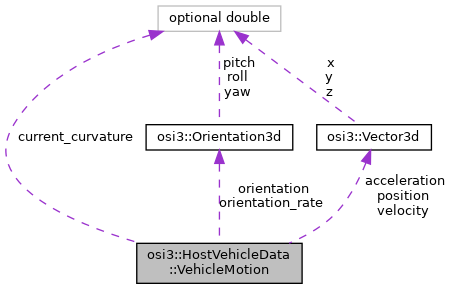
Current calculated and estimated motion related information.
This message contains the most accurate information the vehicle knows about its motion including vehicle dynamics and control related information available in the on-board network, which can differ from the "true" values calculated out of the ground truth.
This data uses the reference point coincident with the middle (in x, y and z) of rear axle under neutral load conditions as defined in MovingObject::VehicleAttributes::bbcenter_to_rear.
Member Data Documentation
◆ position
| optional Vector3d osi3::HostVehicleData::VehicleMotion::position = 1 |
Most accurate position of the vehicle available in the on-board network measured in the cartesian global coordinate system.
◆ orientation
| optional Orientation3d osi3::HostVehicleData::VehicleMotion::orientation = 2 |
Most accurate orientation information of the vehicle available in the on-board network measured on the vehicle coordinate system in context of the global inertial system.
◆ velocity
| optional Vector3d osi3::HostVehicleData::VehicleMotion::velocity = 3 |
Most accurate velocity information of the vehicle, available in the on-board network measured on the vehicle coordinate system in context of the global inertial system.
◆ orientation_rate
| optional Orientation3d osi3::HostVehicleData::VehicleMotion::orientation_rate = 4 |
Most accurate orientation rate of the vehicle, available in the on-board network measured on the vehicle coordinate system in context of the global inertial system.
◆ acceleration
| optional Vector3d osi3::HostVehicleData::VehicleMotion::acceleration = 5 |
Most accurate acceleration information of the vehicle, available in the on-board network measured on the vehicle coordinate system in context of the global inertial system.
◆ current_curvature
| optional double osi3::HostVehicleData::VehicleMotion::current_curvature = 6 |
Most accurate curvature currently followed by vehicle and available in the on-board network.
Unit: m^-1
The documentation for this struct was generated from the following file:
- osi_hostvehicledata.proto