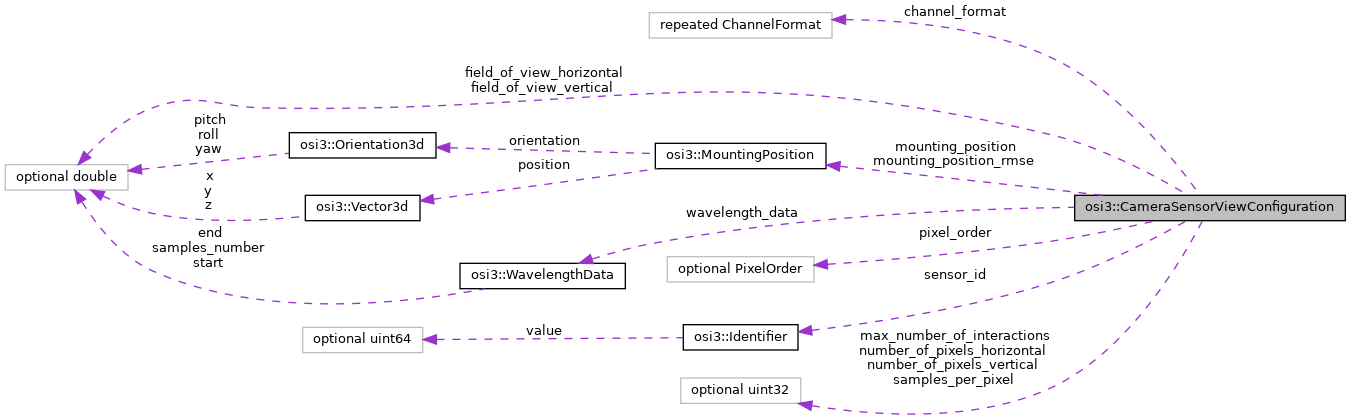
The configuration settings for the Camera Sensor View to be provided by the environment simulation. More...
Public Attributes | |
| optional Identifier | sensor_id = 1 |
| The ID of the sensor at host vehicle's mounting_position. More... | |
| optional MountingPosition | mounting_position = 2 |
| The physical mounting position of the sensor (origin and orientation of the sensor coordinate system) given in vehicle coordinates [1]. More... | |
| optional MountingPosition | mounting_position_rmse = 3 |
| The root mean squared error of the mounting position. More... | |
| optional double | field_of_view_horizontal = 4 |
| Field of View in horizontal orientation of the physical sensor. More... | |
| optional double | field_of_view_vertical = 5 |
| Field of View in vertical orientation of the physical sensor. More... | |
| optional uint32 | number_of_pixels_horizontal = 6 |
| Number of pixels to produce across horizontal field of view. More... | |
| optional uint32 | number_of_pixels_vertical = 7 |
| Number of pixels to produce across horizontal field of view. More... | |
| repeated ChannelFormat | channel_format = 8 |
| Format for image data (includes number, kind and format of channels). More... | |
| optional uint32 | samples_per_pixel = 9 |
| Number of samples per pixel. More... | |
| optional uint32 | max_number_of_interactions = 10 |
| Maximum number of interactions to take into account. More... | |
| repeated WavelengthData | wavelength_data = 11 |
| In use-cases where a spectral ray-tracer is used, this message determines the range of the wavelength and its desired number of samples. More... | |
| optional PixelOrder | pixel_order = 12 |
| Indicates if and how the the pixel data is ordered. More... | |
Detailed Description
The configuration settings for the Camera Sensor View to be provided by the environment simulation.
Member Enumeration Documentation
◆ PixelOrder
Pixel layout.
Pixel layout documents the order of pixels in the image_data in CameraSensorView.
- Note
- this enum does not contain an entry to do mirroring upside down and left-to-right at the same time, because this is equivalent to a 180-degree rotation, which should be indicated in the sensor coordinate system.
| Enumerator | |
|---|---|
| PIXEL_ORDER_DEFAULT | Pixel data is not mirrored (Default). Pixels are ordered left-to-right, top-to-bottom. |
| PIXEL_ORDER_OTHER | Known pixel order that is not supported by OSI. Consider proposing an additional format if using |
| PIXEL_ORDER_RIGHT_LEFT_TOP_BOTTOM | Pixels are ordered right-to-left, top-to-bottom. Pixel data is mirrored along the vertical axis. The image is mirrored left-to-right. |
| PIXEL_ORDER_LEFT_RIGHT_BOTTOM_TOP | Pixels are ordered left-to-right, bottom-to-top. Pixel data is mirrored along the horizontal axis. The image is mirrored top-to-bottom. |
◆ ChannelFormat
Channel format.
| Enumerator | |
|---|---|
| CHANNEL_FORMAT_UNKNOWN | Type of channel format is unknown (must not be used). |
| CHANNEL_FORMAT_OTHER | Unspecified but known channel format. Consider proposing an additional format if using |
| CHANNEL_FORMAT_MONO_U8_LIN | Single Luminance Channel UINT8 Linear. |
| CHANNEL_FORMAT_MONO_U16_LIN | Single Luminance Channel UINT16 Linear. |
| CHANNEL_FORMAT_MONO_U32_LIN | Single Luminance Channel UINT32 Linear. |
| CHANNEL_FORMAT_MONO_F32_LIN | Single Luminance Channel Single Precision FP Linear. |
| CHANNEL_FORMAT_RGB_U8_LIN | Packed RGB Channels (no padding) UINT8 Linear. |
| CHANNEL_FORMAT_RGB_U16_LIN | Packed RGB Channels (no padding) UINT16 Linear. |
| CHANNEL_FORMAT_RGB_U32_LIN | Packed RGB Channels (no padding) UINT32 Linear. |
| CHANNEL_FORMAT_RGB_F32_LIN | Packed RGB Channels (no padding) Single Precision FP Linear. |
| CHANNEL_FORMAT_BAYER_BGGR_U8_LIN | Bayer BGGR Channels UINT8 FP Linear. |
| CHANNEL_FORMAT_BAYER_BGGR_U16_LIN | Bayer BGGR Channels UINT16 FP Linear. |
| CHANNEL_FORMAT_BAYER_BGGR_U32_LIN | Bayer BGGR Channels UINT32 FP Linear. |
| CHANNEL_FORMAT_BAYER_BGGR_F32_LIN | Bayer BGGR Channels Single Precision FP Linear. |
| CHANNEL_FORMAT_BAYER_RGGB_U8_LIN | Bayer RGGB Channels UINT8 FP Linear. |
| CHANNEL_FORMAT_BAYER_RGGB_U16_LIN | Bayer RGGB Channels UINT16 FP Linear. |
| CHANNEL_FORMAT_BAYER_RGGB_U32_LIN | Bayer RGGB Channels UINT32 FP Linear. |
| CHANNEL_FORMAT_BAYER_RGGB_F32_LIN | Bayer RGGB Channels Single Precision FP Linear. |
| CHANNEL_FORMAT_RCCC_U8_LIN | Red Clear Clear Clear Channels UINT8 FP Linear. |
| CHANNEL_FORMAT_RCCC_U16_LIN | Red Clear Clear Clear Channels UINT16 FP Linear. |
| CHANNEL_FORMAT_RCCC_U32_LIN | Red Clear Clear Clear Channels UINT32 FP Linear. |
| CHANNEL_FORMAT_RCCC_F32_LIN | Red Clear Clear Clear Channels Single Precision FP Linear. |
| CHANNEL_FORMAT_RCCB_U8_LIN | Red Clear Clear Blue Channels UINT8 FP Linear. |
| CHANNEL_FORMAT_RCCB_U16_LIN | Red Clear Clear Blue Channels UINT16 FP Linear. |
| CHANNEL_FORMAT_RCCB_U32_LIN | Red Clear Clear Blue Channels UINT32 FP Linear. |
| CHANNEL_FORMAT_RCCB_F32_LIN | Red Clear Clear Blue Channels Single Precision FP Linear. |
Member Data Documentation
◆ sensor_id
| optional Identifier osi3::CameraSensorViewConfiguration::sensor_id = 1 |
The ID of the sensor at host vehicle's mounting_position.
This is the ID of the physical sensor, to be used in its detected features output; it is distinct from the ID of its virtual sensor.
The ID is to be provided by the environment simulation, the sensor model is not in a position to provide a useful default value.
◆ mounting_position
| optional MountingPosition osi3::CameraSensorViewConfiguration::mounting_position = 2 |
The physical mounting position of the sensor (origin and orientation of the sensor coordinate system) given in vehicle coordinates [1].
The physical position pertains to this detector individually, and governs the sensor-relative coordinates in features detected by this detector.
- x-direction of sensor coordinate system: sensor viewing direction
- z-direction of sensor coordinate system: sensor (up)
- y-direction of sensor coordinate system: perpendicular to x and z right hand system
- Reference:
- [1] DIN Deutsches Institut fuer Normung e. V. (2013). DIN ISO 8855 Strassenfahrzeuge - Fahrzeugdynamik und Fahrverhalten - Begriffe. (DIN ISO 8855:2013-11). Berlin, Germany.
- Note
- The origin of vehicle's coordinate system in world frame is (
MovingObject::base.BaseMoving::position+ Inverse_Rotation_yaw_pitch_roll(MovingObject::base.BaseMoving::orientation) *MovingObject::VehicleAttributes::bbcenter_to_rear) . The orientation of the vehicle's coordinate system is equal to the orientation of the vehicle's bounding boxMovingObject::base.BaseMoving::orientation. - A default position can be provided by the sensor model (e.g. to indicate the position the model was validated for), but this is optional; the environment simulation must provide a valid mounting position (based on the vehicle configuration) when setting the view configuration.
◆ mounting_position_rmse
| optional MountingPosition osi3::CameraSensorViewConfiguration::mounting_position_rmse = 3 |
The root mean squared error of the mounting position.
◆ field_of_view_horizontal
| optional double osi3::CameraSensorViewConfiguration::field_of_view_horizontal = 4 |
Field of View in horizontal orientation of the physical sensor.
Viewing range: [- field_of_view_horizontal/2, field_of_view_horizontal/2] azimuth in the sensor frame as defined in Spherical3d.
Unit: rad
◆ field_of_view_vertical
| optional double osi3::CameraSensorViewConfiguration::field_of_view_vertical = 5 |
Field of View in vertical orientation of the physical sensor.
Viewing range: [- field_of_view_vertical/2, field_of_view_vertical/2] elevation in the sensor frame at zero azimuth as defined in Spherical3d.
Unit: rad
◆ number_of_pixels_horizontal
| optional uint32 osi3::CameraSensorViewConfiguration::number_of_pixels_horizontal = 6 |
Number of pixels to produce across horizontal field of view.
- Note
- This is a characteristic of the rendering engine of the environment simulation, not a direct characteristic of the sensor.
- Rules\n\code{.unparsed}
- is_greater_than_or_equal_to: 1
◆ number_of_pixels_vertical
| optional uint32 osi3::CameraSensorViewConfiguration::number_of_pixels_vertical = 7 |
Number of pixels to produce across horizontal field of view.
- Note
- This is a characteristic of the rendering engine of the environment simulation, not a direct characteristic of the sensor.
- Rules\n\code{.unparsed}
- is_greater_than_or_equal_to: 1
◆ channel_format
| repeated ChannelFormat osi3::CameraSensorViewConfiguration::channel_format = 8 |
Format for image data (includes number, kind and format of channels).
In the message provided by the sensor model, this field can be repeated and all values are acceptable to the model, with the most acceptable value being listed first, and the remaining values indicating alternatives in descending order of preference.
In the message provided to the sensor model, this field must contain exactly one value, indicating the format of the image data being provided by the simulation environment - which must be one of the values the sensor model requested - or there must be no value, indicating that the simulation environment cannot provide image data in one of the requested formats.
- Rules\n\code{.unparsed}
- is_greater_than_or_equal_to: 1
◆ samples_per_pixel
| optional uint32 osi3::CameraSensorViewConfiguration::samples_per_pixel = 9 |
Number of samples per pixel.
- Note
- This is a characteristic of the ray tracing engine of the environment simulation, not a direct characteristic of the sensor.
- Rules\n\code{.unparsed}
- is_greater_than_or_equal_to: 1
◆ max_number_of_interactions
| optional uint32 osi3::CameraSensorViewConfiguration::max_number_of_interactions = 10 |
Maximum number of interactions to take into account.
- Note
- This is a characteristic of the ray tracing engine of the environment simulation, not a direct characteristic of the sensor.
- Rules\n\code{.unparsed}
- is_greater_than_or_equal_to: 1
◆ wavelength_data
| repeated WavelengthData osi3::CameraSensorViewConfiguration::wavelength_data = 11 |
In use-cases where a spectral ray-tracer is used, this message determines the range of the wavelength and its desired number of samples.
◆ pixel_order
| optional PixelOrder osi3::CameraSensorViewConfiguration::pixel_order = 12 |
Indicates if and how the the pixel data is ordered.
The default value (PIXEL_ORDER_DEFAULT) indicates standard image pixel order (left-to-right, top-to-bottom). The other values can be used to indicate/request mirroring (right to left or bottom to top).
- Note
- For rotations of the pixel data, use the camera coordinate system.
The documentation for this struct was generated from the following file:
- osi_sensorviewconfiguration.proto